#include <string>#include <ros/ros.h>#include <sensor_msgs/Joy.h>#include <sensor_msgs/JointState.h>#include <geometry_msgs/Twist.h>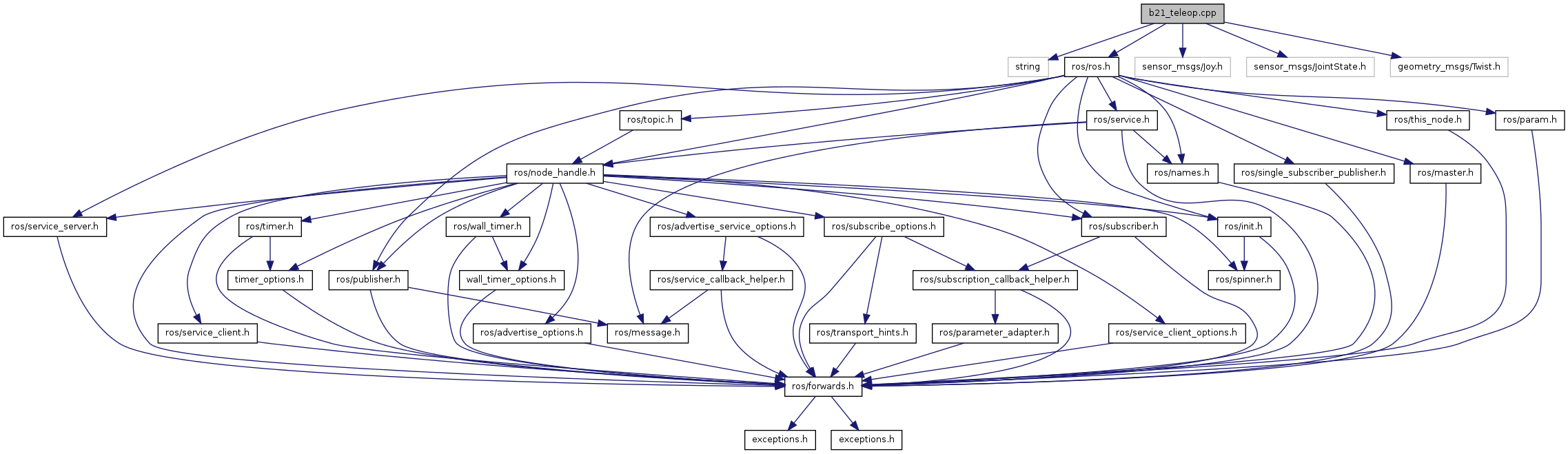
Go to the source code of this file.
Functions | |
| void | joyRcvd (const sensor_msgs::Joy::ConstPtr &msg) |
| int | main (int argc, char **argv) |
| void | posRcvd (const sensor_msgs::JointState::ConstPtr &msg) |
Variables | |
| double | max_speed = 0.500 |
| double | max_turn = 60.0*M_PI/180.0 |
| bool | mode = true |
| float | pcur |
| double | pmax |
| double | pmin |
| double | psmax |
| double | psmin |
| ros::Publisher | pub |
| ros::Publisher | pub2 |
| float | tcur |
| double | tmax |
| double | tmin |
| double | tsmax |
| double | tsmin |
Function Documentation
| void joyRcvd | ( | const sensor_msgs::Joy::ConstPtr & | msg | ) |
Definition at line 22 of file b21_teleop.cpp.
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 83 of file b21_teleop.cpp.
| void posRcvd | ( | const sensor_msgs::JointState::ConstPtr & | msg | ) |
Definition at line 17 of file b21_teleop.cpp.
Variable Documentation
| double max_speed = 0.500 |
Definition at line 14 of file b21_teleop.cpp.
| double max_turn = 60.0*M_PI/180.0 |
Definition at line 15 of file b21_teleop.cpp.
| bool mode = true |
Definition at line 12 of file b21_teleop.cpp.
| float pcur |
Definition at line 11 of file b21_teleop.cpp.
| double pmax |
Definition at line 9 of file b21_teleop.cpp.
| double pmin |
Definition at line 9 of file b21_teleop.cpp.
| double psmax |
Definition at line 10 of file b21_teleop.cpp.
| double psmin |
Definition at line 10 of file b21_teleop.cpp.
Definition at line 7 of file b21_teleop.cpp.
Definition at line 7 of file b21_teleop.cpp.
| float tcur |
Definition at line 11 of file b21_teleop.cpp.
| double tmax |
Definition at line 9 of file b21_teleop.cpp.
| double tmin |
Definition at line 9 of file b21_teleop.cpp.
| double tsmax |
Definition at line 10 of file b21_teleop.cpp.
| double tsmin |
Definition at line 10 of file b21_teleop.cpp.