#include <gtest/gtest.h>#include <pcl/search/brute_force.h>#include <pcl/search/kdtree.h>#include <pcl/search/organized.h>#include <pcl/search/octree.h>#include <pcl/io/pcd_io.h>#include <boost/smart_ptr/shared_array.hpp>#include <boost/random/mersenne_twister.hpp>#include <boost/random/uniform_int.hpp>#include <boost/random/uniform_real.hpp>#include <boost/random/variate_generator.hpp>#include <pcl/common/time.h>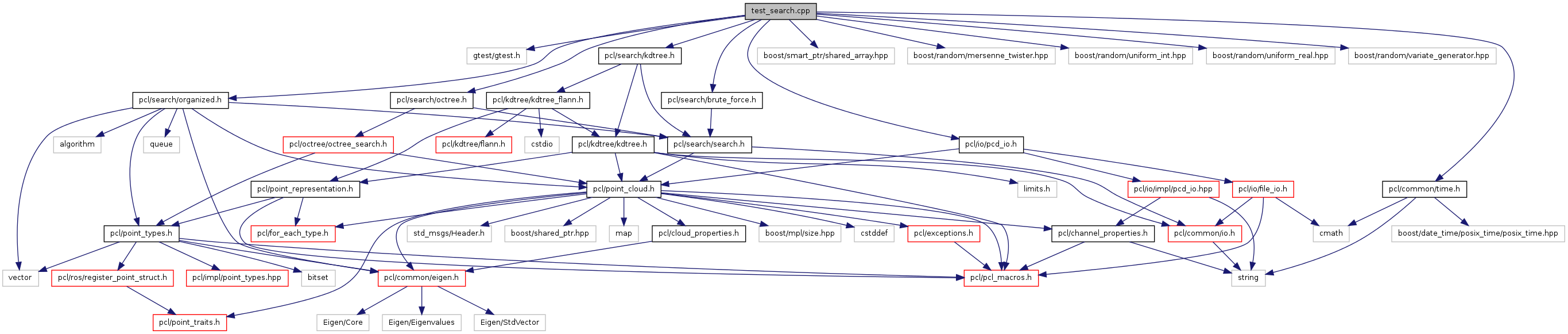
Go to the source code of this file.
Defines | |
| #define | DEBUG_OUT 1 |
| if set to value other than 0 -> fine grained output | |
| #define | EXCESSIVE_TESTING 0 |
| #define | TEST_ORGANIZED_SPARSE_COMPLETE_KNN 1 |
| #define | TEST_ORGANIZED_SPARSE_COMPLETE_RADIUS 1 |
| #define | TEST_ORGANIZED_SPARSE_VIEW_KNN 1 |
| #define | TEST_ORGANIZED_SPARSE_VIEW_RADIUS 1 |
| #define | TEST_unorganized_dense_cloud_COMPLETE_KNN 1 |
| #define | TEST_unorganized_dense_cloud_COMPLETE_RADIUS 1 |
| #define | TEST_unorganized_dense_cloud_VIEW_KNN 1 |
| #define | TEST_unorganized_dense_cloud_VIEW_RADIUS 1 |
| #define | TEST_unorganized_grid_cloud_COMPLETE_RADIUS 1 |
| #define | TEST_unorganized_sparse_cloud_COMPLETE_KNN 1 |
| #define | TEST_unorganized_sparse_cloud_COMPLETE_RADIUS 1 |
| #define | TEST_unorganized_sparse_cloud_VIEW_KNN 1 |
| #define | TEST_unorganized_sparse_cloud_VIEW_RADIUS 1 |
Functions | |
| bool | compareResults (const std::vector< int > &indices1, const ::vector< float > &distances1, const std::string &name1, const std::vector< int > &indices2, const ::vector< float > &distances2, const std::string &name2, float eps) |
| compares two sets of search results | |
| void | createIndices (std::vector< int > &indices, unsigned max_index) |
| create an approx 50% view (subset) of a cloud. | |
| void | createQueryIndices (std::vector< int > &query_indices, PointCloud< PointXYZ >::ConstPtr point_cloud, unsigned query_count) |
| create subset of point in cloud to use as query points | |
| int | main (int argc, char **argv) |
| boost::variate_generator < boost::mt19937, boost::uniform_real< float > > | rand_float (boost::mt19937(), boost::uniform_real< float >(0, 1)) |
| uniform distributed random number generator for floats in the range [0;1] | |
| boost::variate_generator < boost::mt19937, boost::uniform_int< unsigned > > | rand_uint (boost::mt19937(), boost::uniform_int< unsigned >(0, 10)) |
| uniform distributed random number generator for unsigned it in range [0;10] | |
| TEST (PCL, unorganized_dense_cloud_Complete_KNN) | |
| TEST (PCL, unorganized_dense_cloud_View_KNN) | |
| TEST (PCL, unorganized_sparse_cloud_Complete_KNN) | |
| TEST (PCL, unorganized_sparse_cloud_View_KNN) | |
| TEST (PCL, unorganized_dense_cloud_Complete_Radius) | |
| TEST (PCL, unorganized_grid_cloud_Complete_Radius) | |
| TEST (PCL, unorganized_dense_cloud_View_Radius) | |
| TEST (PCL, unorganized_sparse_cloud_Complete_Radius) | |
| TEST (PCL, unorganized_sparse_cloud_View_Radius) | |
| TEST (PCL, Organized_Sparse_Complete_KNN) | |
| TEST (PCL, Organized_Sparse_View_KNN) | |
| TEST (PCL, Organized_Sparse_Complete_Radius) | |
| TEST (PCL, Organized_Sparse_View_Radius) | |
| template<typename PointT > | |
| void | testKNNSearch (typename PointCloud< PointT >::ConstPtr point_cloud, vector< search::Search< PointT > * > search_methods, const vector< int > &query_indices, const vector< int > &input_indices=vector< int >()) |
| does KNN search and tests the results to be unique, valid and ordered. Additionally it test whether all test methods are returning the same results | |
| bool | testOrder (const vector< float > &distances, const string &name) |
| tests whether the ordering of results is ascending on distances | |
| template<typename PointT > | |
| void | testRadiusSearch (typename PointCloud< PointT >::ConstPtr point_cloud, vector< search::Search< PointT > * > search_methods, const vector< int > &query_indices, const vector< int > &input_indices=vector< int >()) |
| does radius search and tests the results to be unique, valid and ordered. Additionally it test whether all test methods are returning the same results | |
| template<typename PointT > | |
| bool | testResultValidity (const typename PointCloud< PointT >::ConstPtr point_cloud, const vector< bool > &indices_mask, const vector< bool > &nan_mask, const vector< int > &indices, const vector< int > &, const string &name) |
| test whether the results are from the view (subset of the cloud) given by input_indices and also not Nan | |
| bool | testUniqueness (const vector< int > &indices, const string &name) |
Variables | |
| pcl::search::BruteForce < pcl::PointXYZ > | brute_force |
| instance of brute force search method to be tested | |
| pcl::search::KdTree < pcl::PointXYZ > | KDTree |
| instance of KDTree search method to be tested | |
| pcl::search::Octree < pcl::PointXYZ > | octree_search (0.1) |
| instance of Octree search method to be tested | |
| pcl::search::OrganizedNeighbor < pcl::PointXYZ > | organized |
| instance of Organized search method to be tested | |
| std::vector< int > | organized_input_indices |
| used by the *_VIEW_* tests to use only a subset of points from the point cloud | |
| vector< search::Search < PointXYZ > * > | organized_search_methods |
| list of search methods for organized search test | |
| PointCloud< PointXYZ >::Ptr | organized_sparse_cloud (new PointCloud< PointXYZ >) |
| organized point cloud | |
| vector< int > | organized_sparse_query_indices |
| const unsigned int | query_count = 100 |
| number of search operations on ordered point clouds | |
| PointCloud< PointXYZ >::Ptr | unorganized_dense_cloud (new PointCloud< PointXYZ >) |
| unorganized point cloud | |
| vector< int > | unorganized_dense_cloud_query_indices |
| lists of indices to be used as query points for various search methods and different cloud types | |
| PointCloud< PointXYZ >::Ptr | unorganized_grid_cloud (new PointCloud< PointXYZ >) |
| unorganized point cloud | |
| std::vector< int > | unorganized_input_indices |
| used by the *_VIEW_* tests to use only a subset of points from the point cloud | |
| const unsigned int | unorganized_point_count = 1200 |
| number of points used for creating unordered point clouds | |
| vector< search::Search < PointXYZ > * > | unorganized_search_methods |
| list of search methods for unorganized search test | |
| PointCloud< PointXYZ >::Ptr | unorganized_sparse_cloud (new PointCloud< PointXYZ >) |
| unorganized point cloud | |
| vector< int > | unorganized_sparse_cloud_query_indices |
Define Documentation
| #define DEBUG_OUT 1 |
if set to value other than 0 -> fine grained output
Definition at line 56 of file test/test_search.cpp.
| #define EXCESSIVE_TESTING 0 |
Definition at line 57 of file test/test_search.cpp.
| #define TEST_ORGANIZED_SPARSE_COMPLETE_KNN 1 |
Definition at line 68 of file test/test_search.cpp.
| #define TEST_ORGANIZED_SPARSE_COMPLETE_RADIUS 1 |
Definition at line 70 of file test/test_search.cpp.
| #define TEST_ORGANIZED_SPARSE_VIEW_KNN 1 |
Definition at line 69 of file test/test_search.cpp.
| #define TEST_ORGANIZED_SPARSE_VIEW_RADIUS 1 |
Definition at line 71 of file test/test_search.cpp.
Definition at line 59 of file test/test_search.cpp.
Definition at line 64 of file test/test_search.cpp.
| #define TEST_unorganized_dense_cloud_VIEW_KNN 1 |
Definition at line 60 of file test/test_search.cpp.
| #define TEST_unorganized_dense_cloud_VIEW_RADIUS 1 |
Definition at line 65 of file test/test_search.cpp.
Definition at line 63 of file test/test_search.cpp.
Definition at line 61 of file test/test_search.cpp.
Definition at line 66 of file test/test_search.cpp.
| #define TEST_unorganized_sparse_cloud_VIEW_KNN 1 |
Definition at line 62 of file test/test_search.cpp.
Definition at line 67 of file test/test_search.cpp.
Function Documentation
| bool compareResults | ( | const std::vector< int > & | indices1, |
| const ::vector< float > & | distances1, | ||
| const std::string & | name1, | ||
| const std::vector< int > & | indices2, | ||
| const ::vector< float > & | distances2, | ||
| const std::string & | name2, | ||
| float | eps | ||
| ) |
compares two sets of search results
- Parameters:
-
indices1 distances1 name1 indices2 distances2 name2 eps threshold for comparing the distances
- Returns:
- true if both sets are the same, false otherwise
Definition at line 235 of file test/test_search.cpp.
| void createIndices | ( | std::vector< int > & | indices, |
| unsigned | max_index | ||
| ) |
create an approx 50% view (subset) of a cloud.
- Parameters:
-
indices max_index highest accented index usually given by cloud->size () - 1
Definition at line 544 of file test/test_search.cpp.
| void createQueryIndices | ( | std::vector< int > & | query_indices, |
| PointCloud< PointXYZ >::ConstPtr | point_cloud, | ||
| unsigned | query_count | ||
| ) |
create subset of point in cloud to use as query points
- Parameters:
-
[out] query_indices resulting query indices - not guaranteed to have size of query_count but guaranteed not to exceed that value cloud input cloud required to check for nans and to get number of points [in] query_count maximum number of query points
Definition at line 529 of file test/test_search.cpp.
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 564 of file test/test_search.cpp.
| boost::variate_generator< boost::mt19937, boost::uniform_real<float> > rand_float | ( | boost:: | mt19937(), |
| boost::uniform_real< float > | 0, 1 | ||
| ) |
uniform distributed random number generator for floats in the range [0;1]
| boost::variate_generator< boost::mt19937, boost::uniform_int<unsigned> > rand_uint | ( | boost:: | mt19937(), |
| boost::uniform_int< unsigned > | 0, 10 | ||
| ) |
uniform distributed random number generator for unsigned it in range [0;10]
| TEST | ( | PCL | , |
| unorganized_dense_cloud_Complete_KNN | |||
| ) |
Definition at line 420 of file test/test_search.cpp.
| TEST | ( | PCL | , |
| unorganized_dense_cloud_View_KNN | |||
| ) |
Definition at line 428 of file test/test_search.cpp.
| TEST | ( | PCL | , |
| unorganized_sparse_cloud_Complete_KNN | |||
| ) |
Definition at line 436 of file test/test_search.cpp.
| TEST | ( | PCL | , |
| unorganized_sparse_cloud_View_KNN | |||
| ) |
Definition at line 443 of file test/test_search.cpp.
| TEST | ( | PCL | , |
| unorganized_dense_cloud_Complete_Radius | |||
| ) |
Definition at line 451 of file test/test_search.cpp.
| TEST | ( | PCL | , |
| unorganized_grid_cloud_Complete_Radius | |||
| ) |
Definition at line 459 of file test/test_search.cpp.
| TEST | ( | PCL | , |
| unorganized_dense_cloud_View_Radius | |||
| ) |
Definition at line 475 of file test/test_search.cpp.
| TEST | ( | PCL | , |
| unorganized_sparse_cloud_Complete_Radius | |||
| ) |
Definition at line 483 of file test/test_search.cpp.
| TEST | ( | PCL | , |
| unorganized_sparse_cloud_View_Radius | |||
| ) |
Definition at line 490 of file test/test_search.cpp.
| TEST | ( | PCL | , |
| Organized_Sparse_Complete_KNN | |||
| ) |
Definition at line 497 of file test/test_search.cpp.
| TEST | ( | PCL | , |
| Organized_Sparse_View_KNN | |||
| ) |
Definition at line 504 of file test/test_search.cpp.
| TEST | ( | PCL | , |
| Organized_Sparse_Complete_Radius | |||
| ) |
Definition at line 511 of file test/test_search.cpp.
| TEST | ( | PCL | , |
| Organized_Sparse_View_Radius | |||
| ) |
Definition at line 518 of file test/test_search.cpp.
| void testKNNSearch | ( | typename PointCloud< PointT >::ConstPtr | point_cloud, |
| vector< search::Search< PointT > * > | search_methods, | ||
| const vector< int > & | query_indices, | ||
| const vector< int > & | input_indices = vector<int> () |
||
| ) |
does KNN search and tests the results to be unique, valid and ordered. Additionally it test whether all test methods are returning the same results
- Parameters:
-
cloud the input point cloud search_methods vector of all search methods to be tested query_indices indices of query points in the point cloud (not necessarily in input_indices) input_indices indices defining a subset of the point cloud.
Definition at line 283 of file test/test_search.cpp.
| bool testOrder | ( | const vector< float > & | distances, |
| const string & | name | ||
| ) |
tests whether the ordering of results is ascending on distances
- Parameters:
-
distances resulting distances from a search name name of the search method that returned these distances
- Returns:
- true if distances in weak ascending order, false otherwise
Definition at line 166 of file test/test_search.cpp.
| void testRadiusSearch | ( | typename PointCloud< PointT >::ConstPtr | point_cloud, |
| vector< search::Search< PointT > * > | search_methods, | ||
| const vector< int > & | query_indices, | ||
| const vector< int > & | input_indices = vector<int> () |
||
| ) |
does radius search and tests the results to be unique, valid and ordered. Additionally it test whether all test methods are returning the same results
- Parameters:
-
cloud the input point cloud search_methods vector of all search methods to be tested query_indices indices of query points in the point cloud (not necessarily in input_indices) input_indices indices defining a subset of the point cloud.
Definition at line 354 of file test/test_search.cpp.
| bool testResultValidity | ( | const typename PointCloud< PointT >::ConstPtr | point_cloud, |
| const vector< bool > & | indices_mask, | ||
| const vector< bool > & | nan_mask, | ||
| const vector< int > & | indices, | ||
| const vector< int > & | , | ||
| const string & | name | ||
| ) |
test whether the results are from the view (subset of the cloud) given by input_indices and also not Nan
- Parameters:
-
indices_mask defines the subset of allowed points (view) in the result of the search nan_mask defines a lookup that indicates whether a point at a given position is finite or not indices result of a search to be tested name name of search method that returned the result
- Returns:
- true if result is valid, false otherwise
Definition at line 193 of file test/test_search.cpp.
| bool testUniqueness | ( | const vector< int > & | indices, |
| const string & | name | ||
| ) |
test whether the result of a search containes unique point ids or not
- Parameters:
-
indices resulting indices from a search name name of the search method that returned these distances
- Returns:
- true if indices are unique, false otherwise
Definition at line 138 of file test/test_search.cpp.
Variable Documentation
instance of brute force search method to be tested
Definition at line 111 of file test/test_search.cpp.
instance of KDTree search method to be tested
Definition at line 114 of file test/test_search.cpp.
instance of Octree search method to be tested
instance of Organized search method to be tested
Definition at line 120 of file test/test_search.cpp.
| std::vector<int> organized_input_indices |
used by the *_VIEW_* tests to use only a subset of points from the point cloud
Definition at line 108 of file test/test_search.cpp.
| vector<search::Search<PointXYZ>* > organized_search_methods |
list of search methods for organized search test
Definition at line 126 of file test/test_search.cpp.
| PointCloud<PointXYZ>::Ptr organized_sparse_cloud(new PointCloud< PointXYZ >) |
organized point cloud
| vector<int> organized_sparse_query_indices |
Definition at line 131 of file test/test_search.cpp.
| const unsigned int query_count = 100 |
number of search operations on ordered point clouds
Definition at line 84 of file test/test_search.cpp.
| PointCloud<PointXYZ>::Ptr unorganized_dense_cloud(new PointCloud< PointXYZ >) |
unorganized point cloud
| vector<int> unorganized_dense_cloud_query_indices |
lists of indices to be used as query points for various search methods and different cloud types
Definition at line 129 of file test/test_search.cpp.
| PointCloud<PointXYZ>::Ptr unorganized_grid_cloud(new PointCloud< PointXYZ >) |
unorganized point cloud
| std::vector<int> unorganized_input_indices |
used by the *_VIEW_* tests to use only a subset of points from the point cloud
Definition at line 105 of file test/test_search.cpp.
| const unsigned int unorganized_point_count = 1200 |
number of points used for creating unordered point clouds
Definition at line 81 of file test/test_search.cpp.
| vector<search::Search<PointXYZ>* > unorganized_search_methods |
list of search methods for unorganized search test
Definition at line 123 of file test/test_search.cpp.
| PointCloud<PointXYZ>::Ptr unorganized_sparse_cloud(new PointCloud< PointXYZ >) |
unorganized point cloud
| vector<int> unorganized_sparse_cloud_query_indices |
Definition at line 130 of file test/test_search.cpp.