#include "typedefs.h"#include <pcl/io/io.h>#include <pcl/features/normal_3d.h>#include <pcl/keypoints/sift_keypoint.h>#include <pcl/features/fpfh.h>#include <pcl/features/vfh.h>
Include dependency graph for iros2011/include/feature_estimation.h:
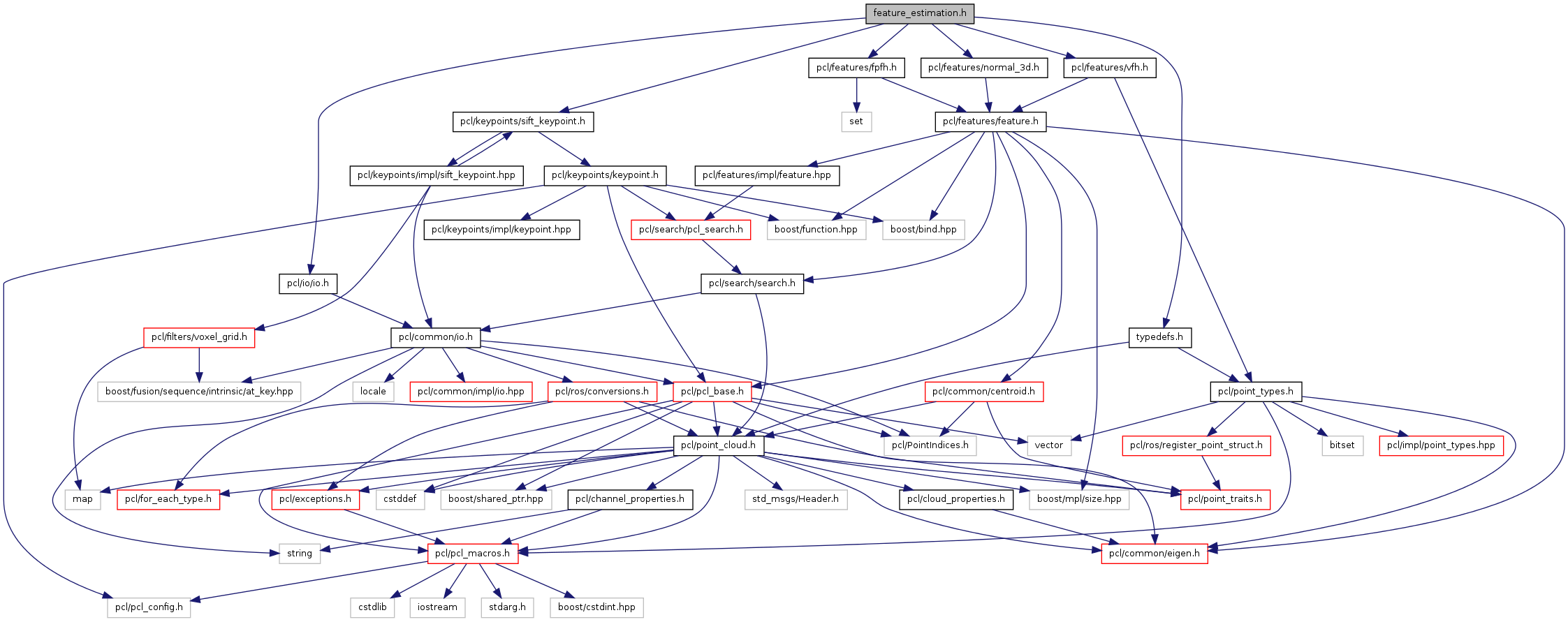
Go to the source code of this file.
Classes | |
| struct | ObjectFeatures |
Functions | |
| ObjectFeatures | computeFeatures (const PointCloudPtr &input) |
| GlobalDescriptorsPtr | computeGlobalDescriptor (const PointCloudPtr &points, const SurfaceNormalsPtr &normals) |
| LocalDescriptorsPtr | computeLocalDescriptors (const PointCloudPtr &points, const SurfaceNormalsPtr &normals, const PointCloudPtr &keypoints, float feature_radius) |
| PointCloudPtr | detectKeypoints (const PointCloudPtr &points, const SurfaceNormalsPtr &normals, float min_scale, int nr_octaves, int nr_scales_per_octave, float min_contrast) |
| SurfaceNormalsPtr | estimateSurfaceNormals (const PointCloudPtr &input, float radius) |
Function Documentation
| ObjectFeatures computeFeatures | ( | const PointCloudPtr & | input | ) |
Definition at line 100 of file iros2011/include/feature_estimation.h.
| GlobalDescriptorsPtr computeGlobalDescriptor | ( | const PointCloudPtr & | points, |
| const SurfaceNormalsPtr & | normals | ||
| ) |
Definition at line 80 of file iros2011/include/feature_estimation.h.
| LocalDescriptorsPtr computeLocalDescriptors | ( | const PointCloudPtr & | points, |
| const SurfaceNormalsPtr & | normals, | ||
| const PointCloudPtr & | keypoints, | ||
| float | feature_radius | ||
| ) |
Definition at line 64 of file iros2011/include/feature_estimation.h.
| PointCloudPtr detectKeypoints | ( | const PointCloudPtr & | points, |
| const SurfaceNormalsPtr & | normals, | ||
| float | min_scale, | ||
| int | nr_octaves, | ||
| int | nr_scales_per_octave, | ||
| float | min_contrast | ||
| ) |
Definition at line 44 of file iros2011/include/feature_estimation.h.
| SurfaceNormalsPtr estimateSurfaceNormals | ( | const PointCloudPtr & | input, |
| float | radius | ||
| ) |
Definition at line 21 of file iros2011/include/feature_estimation.h.