#include <pcl/pcl_macros.h>#include <pcl/common/io.h>#include <boost/numeric/conversion/cast.hpp>#include <cmath>#include <sstream>
Include dependency graph for io/include/pcl/io/file_io.h:
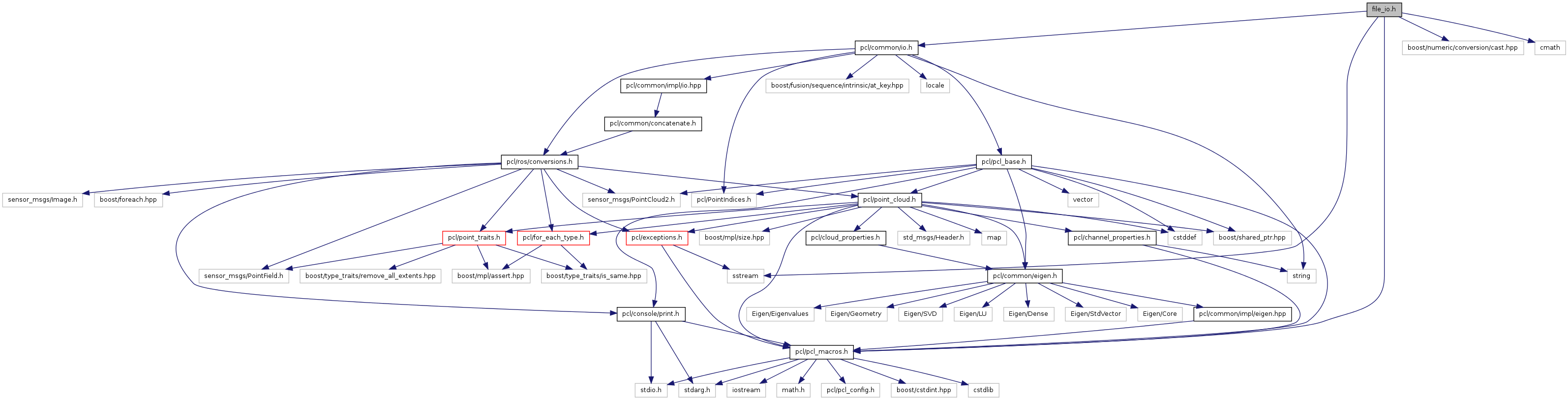
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | pcl::FileReader |
| Point Cloud Data (FILE) file format reader interface. Any (FILE) format file reader should implement its virtual methodes. More... | |
| class | pcl::FileWriter |
| Point Cloud Data (FILE) file format writer. Any (FILE) format file reader should implement its virtual methodes. More... | |
Namespaces | |
| namespace | pcl |
Functions | |
| template<typename Type > | |
| void | pcl::copyStringValue (const std::string &st, sensor_msgs::PointCloud2 &cloud, unsigned int point_index, unsigned int field_idx, unsigned int fields_count) |
| Copy one single value of type T (uchar, char, uint, int, float, double, ...) from a string. | |
| template<> | |
| void | pcl::copyStringValue< int8_t > (const std::string &st, sensor_msgs::PointCloud2 &cloud, unsigned int point_index, unsigned int field_idx, unsigned int fields_count) |
| template<> | |
| void | pcl::copyStringValue< uint8_t > (const std::string &st, sensor_msgs::PointCloud2 &cloud, unsigned int point_index, unsigned int field_idx, unsigned int fields_count) |
| template<typename Type > | |
| void | pcl::copyValueString (const sensor_msgs::PointCloud2 &cloud, const unsigned int point_index, const int point_size, const unsigned int field_idx, const unsigned int fields_count, std::ostream &stream) |
| insers a value of type Type (uchar, char, uint, int, float, double, ...) into a stringstream. | |
| template<> | |
| void | pcl::copyValueString< int8_t > (const sensor_msgs::PointCloud2 &cloud, const unsigned int point_index, const int point_size, const unsigned int field_idx, const unsigned int fields_count, std::ostream &stream) |
| template<> | |
| void | pcl::copyValueString< uint8_t > (const sensor_msgs::PointCloud2 &cloud, const unsigned int point_index, const int point_size, const unsigned int field_idx, const unsigned int fields_count, std::ostream &stream) |
| template<typename Type > | |
| bool | pcl::isValueFinite (const sensor_msgs::PointCloud2 &cloud, const unsigned int point_index, const int point_size, const unsigned int field_idx, const unsigned int fields_count) |
| Check whether a given value of type Type (uchar, char, uint, int, float, double, ...) is finite or not. | |