SACSegmentationFromNormals represents the PCL nodelet segmentation class for Sample Consensus methods and models that require the use of surface normals for estimation. More...
#include <sac_segmentation.h>
Public Types | |
| typedef SACSegmentation < PointT >::PointCloud | PointCloud |
| typedef PointCloud::ConstPtr | PointCloudConstPtr |
| typedef pcl::PointCloud< PointNT > | PointCloudN |
| typedef PointCloudN::ConstPtr | PointCloudNConstPtr |
| typedef PointCloudN::Ptr | PointCloudNPtr |
| typedef PointCloud::Ptr | PointCloudPtr |
| typedef SampleConsensusModelFromNormals < PointT, PointNT >::Ptr | SampleConsensusModelFromNormalsPtr |
| typedef SampleConsensusModel < PointT >::Ptr | SampleConsensusModelPtr |
| typedef SampleConsensus < PointT >::Ptr | SampleConsensusPtr |
Public Member Functions | |
| double | getDistanceFromOrigin () const |
| Get the distance of a plane model from the origin. | |
| PointCloudNConstPtr | getInputNormals () const |
| Get a pointer to the normals of the input XYZ point cloud dataset. | |
| void | getMinMaxOpeningAngle (double &min_angle, double &max_angle) |
| Get the opening angle which we need minumum to validate a cone model. | |
| double | getNormalDistanceWeight () const |
| Get the relative weight (between 0 and 1) to give to the angular distance (0 to pi/2) between point normals and the plane normal. | |
| SACSegmentationFromNormals () | |
| Empty constructor. | |
| void | setDistanceFromOrigin (const double d) |
| Set the distance we expect a plane model to be from the origin. | |
| void | setInputNormals (const PointCloudNConstPtr &normals) |
| Provide a pointer to the input dataset that contains the point normals of the XYZ dataset. | |
| void | setMinMaxOpeningAngle (const double &min_angle, const double &max_angle) |
| Set the minimum opning angle for a cone model. | |
| void | setNormalDistanceWeight (double distance_weight) |
| Set the relative weight (between 0 and 1) to give to the angular distance (0 to pi/2) between point normals and the plane normal. | |
Protected Member Functions | |
| virtual std::string | getClassName () const |
| Class get name method. | |
| virtual bool | initSACModel (const int model_type) |
| Initialize the Sample Consensus model and set its parameters. | |
Protected Attributes | |
| double | distance_from_origin_ |
| The distance from the template plane to the origin. | |
| double | distance_weight_ |
| The relative weight (between 0 and 1) to give to the angular distance (0 to pi/2) between point normals and the plane normal. | |
| double | max_angle_ |
| double | min_angle_ |
| The minimum and maximum allowed opening angle of valid cone model. | |
| PointCloudNConstPtr | normals_ |
| A pointer to the input dataset that contains the point normals of the XYZ dataset. | |
Detailed Description
template<typename PointT, typename PointNT>
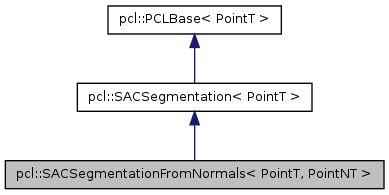
class pcl::SACSegmentationFromNormals< PointT, PointNT >
SACSegmentationFromNormals represents the PCL nodelet segmentation class for Sample Consensus methods and models that require the use of surface normals for estimation.
Definition at line 294 of file sac_segmentation.h.
Member Typedef Documentation
| typedef SACSegmentation<PointT>::PointCloud pcl::SACSegmentationFromNormals< PointT, PointNT >::PointCloud |
Reimplemented from pcl::SACSegmentation< PointT >.
Definition at line 307 of file sac_segmentation.h.
| typedef PointCloud::ConstPtr pcl::SACSegmentationFromNormals< PointT, PointNT >::PointCloudConstPtr |
Reimplemented from pcl::SACSegmentation< PointT >.
Definition at line 309 of file sac_segmentation.h.
| typedef pcl::PointCloud<PointNT> pcl::SACSegmentationFromNormals< PointT, PointNT >::PointCloudN |
Definition at line 311 of file sac_segmentation.h.
| typedef PointCloudN::ConstPtr pcl::SACSegmentationFromNormals< PointT, PointNT >::PointCloudNConstPtr |
Definition at line 313 of file sac_segmentation.h.
| typedef PointCloudN::Ptr pcl::SACSegmentationFromNormals< PointT, PointNT >::PointCloudNPtr |
Definition at line 312 of file sac_segmentation.h.
| typedef PointCloud::Ptr pcl::SACSegmentationFromNormals< PointT, PointNT >::PointCloudPtr |
Reimplemented from pcl::SACSegmentation< PointT >.
Definition at line 308 of file sac_segmentation.h.
| typedef SampleConsensusModelFromNormals<PointT, PointNT>::Ptr pcl::SACSegmentationFromNormals< PointT, PointNT >::SampleConsensusModelFromNormalsPtr |
Definition at line 317 of file sac_segmentation.h.
| typedef SampleConsensusModel<PointT>::Ptr pcl::SACSegmentationFromNormals< PointT, PointNT >::SampleConsensusModelPtr |
Reimplemented from pcl::SACSegmentation< PointT >.
Definition at line 316 of file sac_segmentation.h.
| typedef SampleConsensus<PointT>::Ptr pcl::SACSegmentationFromNormals< PointT, PointNT >::SampleConsensusPtr |
Reimplemented from pcl::SACSegmentation< PointT >.
Definition at line 315 of file sac_segmentation.h.
Constructor & Destructor Documentation
| pcl::SACSegmentationFromNormals< PointT, PointNT >::SACSegmentationFromNormals | ( | ) | [inline] |
Empty constructor.
Definition at line 320 of file sac_segmentation.h.
Member Function Documentation
| virtual std::string pcl::SACSegmentationFromNormals< PointT, PointNT >::getClassName | ( | ) | const [inline, protected, virtual] |
Class get name method.
Reimplemented from pcl::SACSegmentation< PointT >.
Definition at line 403 of file sac_segmentation.h.
| double pcl::SACSegmentationFromNormals< PointT, PointNT >::getDistanceFromOrigin | ( | ) | const [inline] |
Get the distance of a plane model from the origin.
Definition at line 377 of file sac_segmentation.h.
| PointCloudNConstPtr pcl::SACSegmentationFromNormals< PointT, PointNT >::getInputNormals | ( | ) | const [inline] |
Get a pointer to the normals of the input XYZ point cloud dataset.
Definition at line 337 of file sac_segmentation.h.
| void pcl::SACSegmentationFromNormals< PointT, PointNT >::getMinMaxOpeningAngle | ( | double & | min_angle, |
| double & | max_angle | ||
| ) | [inline] |
Get the opening angle which we need minumum to validate a cone model.
Definition at line 363 of file sac_segmentation.h.
| double pcl::SACSegmentationFromNormals< PointT, PointNT >::getNormalDistanceWeight | ( | ) | const [inline] |
Get the relative weight (between 0 and 1) to give to the angular distance (0 to pi/2) between point normals and the plane normal.
Definition at line 349 of file sac_segmentation.h.
| bool pcl::SACSegmentationFromNormals< PointT, PointNT >::initSACModel | ( | const int | model_type | ) | [protected, virtual] |
Initialize the Sample Consensus model and set its parameters.
- Parameters:
-
[in] model_type the type of SAC model that is to be used
Reimplemented from pcl::SACSegmentation< PointT >.
Definition at line 326 of file sac_segmentation.hpp.
| void pcl::SACSegmentationFromNormals< PointT, PointNT >::setDistanceFromOrigin | ( | const double | d | ) | [inline] |
Set the distance we expect a plane model to be from the origin.
- Parameters:
-
[in] d distance from the template plane modl to the origin
Definition at line 373 of file sac_segmentation.h.
| void pcl::SACSegmentationFromNormals< PointT, PointNT >::setInputNormals | ( | const PointCloudNConstPtr & | normals | ) | [inline] |
Provide a pointer to the input dataset that contains the point normals of the XYZ dataset.
- Parameters:
-
[in] normals the const boost shared pointer to a PointCloud message
Definition at line 333 of file sac_segmentation.h.
| void pcl::SACSegmentationFromNormals< PointT, PointNT >::setMinMaxOpeningAngle | ( | const double & | min_angle, |
| const double & | max_angle | ||
| ) | [inline] |
Set the minimum opning angle for a cone model.
- Parameters:
-
oa the opening angle which we need minumum to validate a cone model.
Definition at line 355 of file sac_segmentation.h.
| void pcl::SACSegmentationFromNormals< PointT, PointNT >::setNormalDistanceWeight | ( | double | distance_weight | ) | [inline] |
Set the relative weight (between 0 and 1) to give to the angular distance (0 to pi/2) between point normals and the plane normal.
- Parameters:
-
[in] distance_weight the distance/angular weight
Definition at line 344 of file sac_segmentation.h.
Member Data Documentation
double pcl::SACSegmentationFromNormals< PointT, PointNT >::distance_from_origin_ [protected] |
The distance from the template plane to the origin.
Definition at line 389 of file sac_segmentation.h.
double pcl::SACSegmentationFromNormals< PointT, PointNT >::distance_weight_ [protected] |
The relative weight (between 0 and 1) to give to the angular distance (0 to pi/2) between point normals and the plane normal.
Definition at line 386 of file sac_segmentation.h.
double pcl::SACSegmentationFromNormals< PointT, PointNT >::max_angle_ [protected] |
Definition at line 393 of file sac_segmentation.h.
double pcl::SACSegmentationFromNormals< PointT, PointNT >::min_angle_ [protected] |
The minimum and maximum allowed opening angle of valid cone model.
Definition at line 392 of file sac_segmentation.h.
PointCloudNConstPtr pcl::SACSegmentationFromNormals< PointT, PointNT >::normals_ [protected] |
A pointer to the input dataset that contains the point normals of the XYZ dataset.
Definition at line 381 of file sac_segmentation.h.
The documentation for this class was generated from the following files: