SACSegmentation represents the Nodelet segmentation class for Sample Consensus methods and models, in the sense that it just creates a Nodelet wrapper for generic-purpose SAC-based segmentation. More...
#include <sac_segmentation.h>
Public Types | |
| typedef pcl::PointCloud< PointT > | PointCloud |
| typedef PointCloud::ConstPtr | PointCloudConstPtr |
| typedef PointCloud::Ptr | PointCloudPtr |
| typedef SampleConsensusModel < PointT >::Ptr | SampleConsensusModelPtr |
| typedef SampleConsensus < PointT >::Ptr | SampleConsensusPtr |
| typedef pcl::search::Search < PointT >::Ptr | SearchPtr |
Public Member Functions | |
| Eigen::Vector3f | getAxis () const |
| Get the axis along which we need to search for a model perpendicular to. | |
| double | getDistanceThreshold () const |
| Get the distance to the model threshold. | |
| double | getEpsAngle () const |
| Get the epsilon (delta) model angle threshold in radians. | |
| int | getMaxIterations () const |
| Get maximum number of iterations before giving up. | |
| SampleConsensusPtr | getMethod () const |
| Get a pointer to the SAC method used. | |
| int | getMethodType () const |
| Get the type of sample consensus method used. | |
| SampleConsensusModelPtr | getModel () const |
| Get a pointer to the SAC model used. | |
| int | getModelType () const |
| Get the type of SAC model used. | |
| bool | getOptimizeCoefficients () const |
| Get the coefficient refinement internal flag. | |
| double | getProbability () const |
| Get the probability of choosing at least one sample free from outliers. | |
| void | getRadiusLimits (double &min_radius, double &max_radius) |
| Get the minimum and maximum allowable radius limits for the model as set by the user. | |
| void | getSamplesMaxDist (double &radius) |
| Get maximum distance allowed when drawing random samples. | |
| SACSegmentation () | |
| Empty constructor. | |
| virtual void | segment (PointIndices &inliers, ModelCoefficients &model_coefficients) |
| Base method for segmentation of a model in a PointCloud given by <setInputCloud (), setIndices ()> | |
| void | setAxis (const Eigen::Vector3f &ax) |
| Set the axis along which we need to search for a model perpendicular to. | |
| void | setDistanceThreshold (double threshold) |
| Distance to the model threshold (user given parameter). | |
| void | setEpsAngle (double ea) |
| Set the angle epsilon (delta) threshold. | |
| void | setMaxIterations (int max_iterations) |
| Set the maximum number of iterations before giving up. | |
| void | setMethodType (int method) |
| The type of sample consensus method to use (user given parameter). | |
| void | setModelType (int model) |
| The type of model to use (user given parameter). | |
| void | setOptimizeCoefficients (bool optimize) |
| Set to true if a coefficient refinement is required. | |
| void | setProbability (double probability) |
| Set the probability of choosing at least one sample free from outliers. | |
| void | setRadiusLimits (const double &min_radius, const double &max_radius) |
| Set the minimum and maximum allowable radius limits for the model (applicable to models that estimate a radius) | |
| void | setSamplesMaxDist (const double &radius, SearchPtr search) |
| Set the maximum distance allowed when drawing random samples. | |
| virtual | ~SACSegmentation () |
| Empty destructor. | |
Protected Member Functions | |
| virtual std::string | getClassName () const |
| Class get name method. | |
| virtual void | initSAC (const int method_type) |
| Initialize the Sample Consensus method and set its parameters. | |
| virtual bool | initSACModel (const int model_type) |
| Initialize the Sample Consensus model and set its parameters. | |
Protected Attributes | |
| Eigen::Vector3f | axis_ |
| The axis along which we need to search for a model perpendicular to. | |
| double | eps_angle_ |
| The maximum allowed difference between the model normal and the given axis. | |
| int | max_iterations_ |
| Maximum number of iterations before giving up (user given parameter). | |
| int | method_type_ |
| The type of sample consensus method to use (user given parameter). | |
| SampleConsensusModelPtr | model_ |
| The model that needs to be segmented. | |
| int | model_type_ |
| The type of model to use (user given parameter). | |
| bool | optimize_coefficients_ |
| Set to true if a coefficient refinement is required. | |
| double | probability_ |
| Desired probability of choosing at least one sample free from outliers (user given parameter). | |
| double | radius_max_ |
| double | radius_min_ |
| The minimum and maximum radius limits for the model. Applicable to all models that estimate a radius. | |
| SampleConsensusPtr | sac_ |
| The sample consensus segmentation method. | |
| double | samples_radius_ |
| The maximum distance of subsequent samples from the first (radius search) | |
| SearchPtr | samples_radius_search_ |
| The search object for picking subsequent samples using radius search. | |
| double | threshold_ |
| Distance to the model threshold (user given parameter). | |
Detailed Description
template<typename PointT>
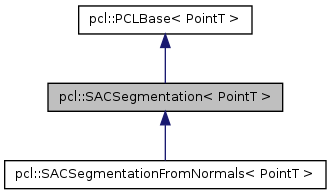
class pcl::SACSegmentation< PointT >
SACSegmentation represents the Nodelet segmentation class for Sample Consensus methods and models, in the sense that it just creates a Nodelet wrapper for generic-purpose SAC-based segmentation.
Definition at line 65 of file sac_segmentation.h.
Member Typedef Documentation
| typedef pcl::PointCloud<PointT> pcl::SACSegmentation< PointT >::PointCloud |
Reimplemented from pcl::PCLBase< PointT >.
Reimplemented in pcl::SACSegmentationFromNormals< PointT, PointNT >, and pcl::SACSegmentationFromNormals< PointType, pcl::Normal >.
Definition at line 74 of file sac_segmentation.h.
| typedef PointCloud::ConstPtr pcl::SACSegmentation< PointT >::PointCloudConstPtr |
Reimplemented from pcl::PCLBase< PointT >.
Reimplemented in pcl::SACSegmentationFromNormals< PointT, PointNT >, and pcl::SACSegmentationFromNormals< PointType, pcl::Normal >.
Definition at line 76 of file sac_segmentation.h.
| typedef PointCloud::Ptr pcl::SACSegmentation< PointT >::PointCloudPtr |
Reimplemented from pcl::PCLBase< PointT >.
Reimplemented in pcl::SACSegmentationFromNormals< PointT, PointNT >, and pcl::SACSegmentationFromNormals< PointType, pcl::Normal >.
Definition at line 75 of file sac_segmentation.h.
| typedef SampleConsensusModel<PointT>::Ptr pcl::SACSegmentation< PointT >::SampleConsensusModelPtr |
Reimplemented in pcl::SACSegmentationFromNormals< PointT, PointNT >, and pcl::SACSegmentationFromNormals< PointType, pcl::Normal >.
Definition at line 80 of file sac_segmentation.h.
| typedef SampleConsensus<PointT>::Ptr pcl::SACSegmentation< PointT >::SampleConsensusPtr |
Reimplemented in pcl::SACSegmentationFromNormals< PointT, PointNT >, and pcl::SACSegmentationFromNormals< PointType, pcl::Normal >.
Definition at line 79 of file sac_segmentation.h.
| typedef pcl::search::Search<PointT>::Ptr pcl::SACSegmentation< PointT >::SearchPtr |
Definition at line 77 of file sac_segmentation.h.
Constructor & Destructor Documentation
| pcl::SACSegmentation< PointT >::SACSegmentation | ( | ) | [inline] |
Empty constructor.
Definition at line 83 of file sac_segmentation.h.
| virtual pcl::SACSegmentation< PointT >::~SACSegmentation | ( | ) | [inline, virtual] |
Empty destructor.
Definition at line 92 of file sac_segmentation.h.
Member Function Documentation
| Eigen::Vector3f pcl::SACSegmentation< PointT >::getAxis | ( | ) | const [inline] |
Get the axis along which we need to search for a model perpendicular to.
Definition at line 213 of file sac_segmentation.h.
| virtual std::string pcl::SACSegmentation< PointT >::getClassName | ( | ) | const [inline, protected, virtual] |
Class get name method.
Reimplemented in pcl::SACSegmentationFromNormals< PointT, PointNT >, and pcl::SACSegmentationFromNormals< PointType, pcl::Normal >.
Definition at line 286 of file sac_segmentation.h.
| double pcl::SACSegmentation< PointT >::getDistanceThreshold | ( | ) | const [inline] |
Get the distance to the model threshold.
Definition at line 130 of file sac_segmentation.h.
| double pcl::SACSegmentation< PointT >::getEpsAngle | ( | ) | const [inline] |
Get the epsilon (delta) model angle threshold in radians.
Definition at line 223 of file sac_segmentation.h.
| int pcl::SACSegmentation< PointT >::getMaxIterations | ( | ) | const [inline] |
Get maximum number of iterations before giving up.
Definition at line 140 of file sac_segmentation.h.
| SampleConsensusPtr pcl::SACSegmentation< PointT >::getMethod | ( | ) | const [inline] |
Get a pointer to the SAC method used.
Definition at line 106 of file sac_segmentation.h.
| int pcl::SACSegmentation< PointT >::getMethodType | ( | ) | const [inline] |
Get the type of sample consensus method used.
Definition at line 120 of file sac_segmentation.h.
| SampleConsensusModelPtr pcl::SACSegmentation< PointT >::getModel | ( | ) | const [inline] |
Get a pointer to the SAC model used.
Definition at line 110 of file sac_segmentation.h.
| int pcl::SACSegmentation< PointT >::getModelType | ( | ) | const [inline] |
Get the type of SAC model used.
Definition at line 102 of file sac_segmentation.h.
| bool pcl::SACSegmentation< PointT >::getOptimizeCoefficients | ( | ) | const [inline] |
Get the coefficient refinement internal flag.
Definition at line 160 of file sac_segmentation.h.
| double pcl::SACSegmentation< PointT >::getProbability | ( | ) | const [inline] |
Get the probability of choosing at least one sample free from outliers.
Definition at line 150 of file sac_segmentation.h.
| void pcl::SACSegmentation< PointT >::getRadiusLimits | ( | double & | min_radius, |
| double & | max_radius | ||
| ) | [inline] |
Get the minimum and maximum allowable radius limits for the model as set by the user.
- Parameters:
-
[out] min_radius the resultant minimum radius model [out] max_radius the resultant maximum radius model
Definition at line 179 of file sac_segmentation.h.
| void pcl::SACSegmentation< PointT >::getSamplesMaxDist | ( | double & | radius | ) | [inline] |
Get maximum distance allowed when drawing random samples.
- Parameters:
-
[out] radius the maximum distance (L2 norm)
Definition at line 200 of file sac_segmentation.h.
| void pcl::SACSegmentation< PointT >::initSAC | ( | const int | method_type | ) | [protected, virtual] |
Initialize the Sample Consensus method and set its parameters.
- Parameters:
-
[in] method_type the type of SAC method to be used
Definition at line 260 of file sac_segmentation.hpp.
| bool pcl::SACSegmentation< PointT >::initSACModel | ( | const int | model_type | ) | [protected, virtual] |
Initialize the Sample Consensus model and set its parameters.
- Parameters:
-
[in] model_type the type of SAC model that is to be used
Reimplemented in pcl::SACSegmentationFromNormals< PointT, PointNT >, and pcl::SACSegmentationFromNormals< PointType, pcl::Normal >.
Definition at line 129 of file sac_segmentation.hpp.
| void pcl::SACSegmentation< PointT >::segment | ( | PointIndices & | inliers, |
| ModelCoefficients & | model_coefficients | ||
| ) | [virtual] |
Base method for segmentation of a model in a PointCloud given by <setInputCloud (), setIndices ()>
- Parameters:
-
[in] inliers the resultant point indices that support the model found (inliers) [out] model_coefficients the resultant model coefficients
Definition at line 71 of file sac_segmentation.hpp.
| void pcl::SACSegmentation< PointT >::setAxis | ( | const Eigen::Vector3f & | ax | ) | [inline] |
Set the axis along which we need to search for a model perpendicular to.
- Parameters:
-
[in] ax the axis along which we need to search for a model perpendicular to
Definition at line 209 of file sac_segmentation.h.
| void pcl::SACSegmentation< PointT >::setDistanceThreshold | ( | double | threshold | ) | [inline] |
Distance to the model threshold (user given parameter).
- Parameters:
-
[in] threshold the distance threshold to use
Definition at line 126 of file sac_segmentation.h.
| void pcl::SACSegmentation< PointT >::setEpsAngle | ( | double | ea | ) | [inline] |
Set the angle epsilon (delta) threshold.
- Parameters:
-
[in] ea the maximum allowed difference between the model normal and the given axis in radians.
Definition at line 219 of file sac_segmentation.h.
| void pcl::SACSegmentation< PointT >::setMaxIterations | ( | int | max_iterations | ) | [inline] |
Set the maximum number of iterations before giving up.
- Parameters:
-
[in] max_iterations the maximum number of iterations the sample consensus method will run
Definition at line 136 of file sac_segmentation.h.
| void pcl::SACSegmentation< PointT >::setMethodType | ( | int | method | ) | [inline] |
The type of sample consensus method to use (user given parameter).
- Parameters:
-
[in] method the method type (check method_types.h)
Definition at line 116 of file sac_segmentation.h.
| void pcl::SACSegmentation< PointT >::setModelType | ( | int | model | ) | [inline] |
The type of model to use (user given parameter).
- Parameters:
-
[in] model the model type (check model_types.h)
Definition at line 98 of file sac_segmentation.h.
| void pcl::SACSegmentation< PointT >::setOptimizeCoefficients | ( | bool | optimize | ) | [inline] |
Set to true if a coefficient refinement is required.
- Parameters:
-
[in] optimize true for enabling model coefficient refinement, false otherwise
Definition at line 156 of file sac_segmentation.h.
| void pcl::SACSegmentation< PointT >::setProbability | ( | double | probability | ) | [inline] |
Set the probability of choosing at least one sample free from outliers.
- Parameters:
-
[in] probability the model fitting probability
Definition at line 146 of file sac_segmentation.h.
| void pcl::SACSegmentation< PointT >::setRadiusLimits | ( | const double & | min_radius, |
| const double & | max_radius | ||
| ) | [inline] |
Set the minimum and maximum allowable radius limits for the model (applicable to models that estimate a radius)
- Parameters:
-
[in] min_radius the minimum radius model [in] max_radius the maximum radius model
Definition at line 168 of file sac_segmentation.h.
| void pcl::SACSegmentation< PointT >::setSamplesMaxDist | ( | const double & | radius, |
| SearchPtr | search | ||
| ) | [inline] |
Set the maximum distance allowed when drawing random samples.
- Parameters:
-
[in] radius the maximum distance (L2 norm)
Definition at line 189 of file sac_segmentation.h.
Member Data Documentation
Eigen::Vector3f pcl::SACSegmentation< PointT >::axis_ [protected] |
The axis along which we need to search for a model perpendicular to.
Definition at line 276 of file sac_segmentation.h.
double pcl::SACSegmentation< PointT >::eps_angle_ [protected] |
The maximum allowed difference between the model normal and the given axis.
Definition at line 273 of file sac_segmentation.h.
int pcl::SACSegmentation< PointT >::max_iterations_ [protected] |
Maximum number of iterations before giving up (user given parameter).
Definition at line 279 of file sac_segmentation.h.
int pcl::SACSegmentation< PointT >::method_type_ [protected] |
The type of sample consensus method to use (user given parameter).
Definition at line 255 of file sac_segmentation.h.
SampleConsensusModelPtr pcl::SACSegmentation< PointT >::model_ [protected] |
The model that needs to be segmented.
Definition at line 246 of file sac_segmentation.h.
int pcl::SACSegmentation< PointT >::model_type_ [protected] |
The type of model to use (user given parameter).
Definition at line 252 of file sac_segmentation.h.
bool pcl::SACSegmentation< PointT >::optimize_coefficients_ [protected] |
Set to true if a coefficient refinement is required.
Definition at line 261 of file sac_segmentation.h.
double pcl::SACSegmentation< PointT >::probability_ [protected] |
Desired probability of choosing at least one sample free from outliers (user given parameter).
Definition at line 282 of file sac_segmentation.h.
double pcl::SACSegmentation< PointT >::radius_max_ [protected] |
Definition at line 264 of file sac_segmentation.h.
double pcl::SACSegmentation< PointT >::radius_min_ [protected] |
The minimum and maximum radius limits for the model. Applicable to all models that estimate a radius.
Definition at line 264 of file sac_segmentation.h.
SampleConsensusPtr pcl::SACSegmentation< PointT >::sac_ [protected] |
The sample consensus segmentation method.
Definition at line 249 of file sac_segmentation.h.
double pcl::SACSegmentation< PointT >::samples_radius_ [protected] |
The maximum distance of subsequent samples from the first (radius search)
Definition at line 267 of file sac_segmentation.h.
SearchPtr pcl::SACSegmentation< PointT >::samples_radius_search_ [protected] |
The search object for picking subsequent samples using radius search.
Definition at line 270 of file sac_segmentation.h.
double pcl::SACSegmentation< PointT >::threshold_ [protected] |
Distance to the model threshold (user given parameter).
Definition at line 258 of file sac_segmentation.h.
The documentation for this class was generated from the following files: