#include <pcl_base.h>
Public Types | |
| typedef sensor_msgs::PointCloud2 | PointCloud2 |
| typedef PointCloud2::ConstPtr | PointCloud2ConstPtr |
| typedef PointCloud2::Ptr | PointCloud2Ptr |
| typedef PointIndices::ConstPtr | PointIndicesConstPtr |
| typedef PointIndices::Ptr | PointIndicesPtr |
Public Member Functions | |
| IndicesPtr const | getIndices () |
| Get a pointer to the vector of indices used. | |
| PointCloud2ConstPtr const | getInputCloud () |
| Get a pointer to the input point cloud dataset. | |
| PCLBase () | |
| Empty constructor. | |
| void | setIndices (const IndicesPtr &indices) |
| Provide a pointer to the vector of indices that represents the input data. | |
| void | setIndices (const PointIndicesConstPtr &indices) |
| Provide a pointer to the vector of indices that represents the input data. | |
| void | setInputCloud (const PointCloud2ConstPtr &cloud) |
| Provide a pointer to the input dataset. | |
| virtual | ~PCLBase () |
| destructor. | |
Protected Member Functions | |
| bool | deinitCompute () |
| bool | initCompute () |
Protected Attributes | |
| bool | fake_indices_ |
| If no set of indices are given, we construct a set of fake indices that mimic the input PointCloud. | |
| std::vector< int > | field_sizes_ |
| The size of each individual field. | |
| IndicesPtr | indices_ |
| A pointer to the vector of point indices to use. | |
| PointCloud2ConstPtr | input_ |
| The input point cloud dataset. | |
| bool | use_indices_ |
| Set to true if point indices are used. | |
| std::string | x_field_name_ |
| The desired x-y-z field names. | |
| int | x_idx_ |
| The x-y-z fields indices. | |
| std::string | y_field_name_ |
| int | y_idx_ |
| std::string | z_field_name_ |
| int | z_idx_ |
Detailed Description
template<>
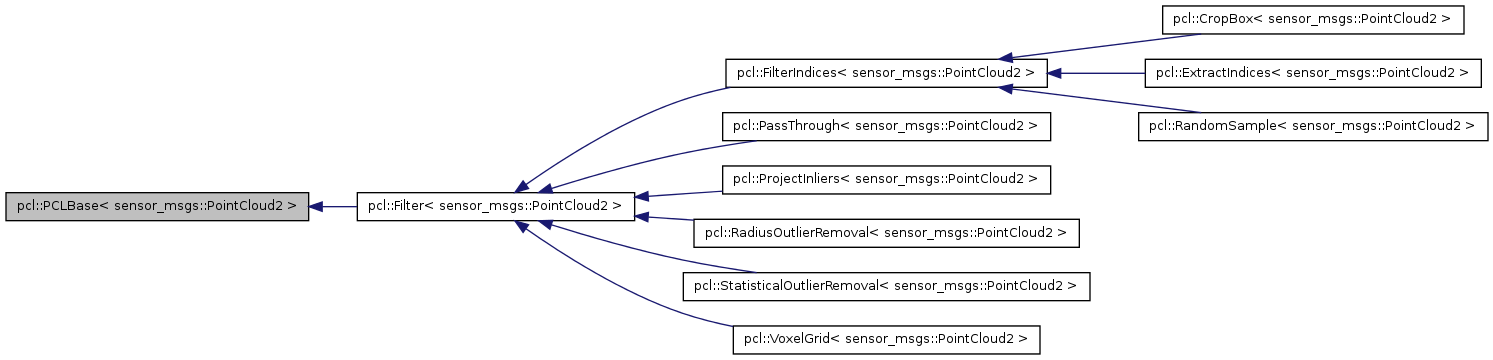
class pcl::PCLBase< sensor_msgs::PointCloud2 >
Definition at line 272 of file pcl_base.h.
Member Typedef Documentation
| typedef sensor_msgs::PointCloud2 pcl::PCLBase< sensor_msgs::PointCloud2 >::PointCloud2 |
Reimplemented in pcl::VoxelGrid< sensor_msgs::PointCloud2 >, pcl::PassThrough< sensor_msgs::PointCloud2 >, pcl::StatisticalOutlierRemoval< sensor_msgs::PointCloud2 >, pcl::FilterIndices< sensor_msgs::PointCloud2 >, pcl::CropBox< sensor_msgs::PointCloud2 >, pcl::RadiusOutlierRemoval< sensor_msgs::PointCloud2 >, pcl::ProjectInliers< sensor_msgs::PointCloud2 >, pcl::Filter< sensor_msgs::PointCloud2 >, pcl::ExtractIndices< sensor_msgs::PointCloud2 >, and pcl::RandomSample< sensor_msgs::PointCloud2 >.
Definition at line 275 of file pcl_base.h.
| typedef PointCloud2::ConstPtr pcl::PCLBase< sensor_msgs::PointCloud2 >::PointCloud2ConstPtr |
Reimplemented in pcl::VoxelGrid< sensor_msgs::PointCloud2 >, pcl::PassThrough< sensor_msgs::PointCloud2 >, pcl::StatisticalOutlierRemoval< sensor_msgs::PointCloud2 >, pcl::CropBox< sensor_msgs::PointCloud2 >, pcl::RadiusOutlierRemoval< sensor_msgs::PointCloud2 >, pcl::ProjectInliers< sensor_msgs::PointCloud2 >, pcl::Filter< sensor_msgs::PointCloud2 >, pcl::ExtractIndices< sensor_msgs::PointCloud2 >, and pcl::RandomSample< sensor_msgs::PointCloud2 >.
Definition at line 277 of file pcl_base.h.
| typedef PointCloud2::Ptr pcl::PCLBase< sensor_msgs::PointCloud2 >::PointCloud2Ptr |
Reimplemented in pcl::VoxelGrid< sensor_msgs::PointCloud2 >, pcl::PassThrough< sensor_msgs::PointCloud2 >, pcl::StatisticalOutlierRemoval< sensor_msgs::PointCloud2 >, pcl::CropBox< sensor_msgs::PointCloud2 >, pcl::RadiusOutlierRemoval< sensor_msgs::PointCloud2 >, pcl::ProjectInliers< sensor_msgs::PointCloud2 >, pcl::Filter< sensor_msgs::PointCloud2 >, pcl::ExtractIndices< sensor_msgs::PointCloud2 >, and pcl::RandomSample< sensor_msgs::PointCloud2 >.
Definition at line 276 of file pcl_base.h.
| typedef PointIndices::ConstPtr pcl::PCLBase< sensor_msgs::PointCloud2 >::PointIndicesConstPtr |
Definition at line 280 of file pcl_base.h.
| typedef PointIndices::Ptr pcl::PCLBase< sensor_msgs::PointCloud2 >::PointIndicesPtr |
Definition at line 279 of file pcl_base.h.
Constructor & Destructor Documentation
| pcl::PCLBase< sensor_msgs::PointCloud2 >::PCLBase | ( | ) | [inline] |
Empty constructor.
Definition at line 283 of file pcl_base.h.
| virtual pcl::PCLBase< sensor_msgs::PointCloud2 >::~PCLBase | ( | ) | [inline, virtual] |
destructor.
Definition at line 289 of file pcl_base.h.
Member Function Documentation
| bool pcl::PCLBase< sensor_msgs::PointCloud2 >::deinitCompute | ( | ) | [protected] |
Definition at line 106 of file pcl_base.cpp.
| IndicesPtr const pcl::PCLBase< sensor_msgs::PointCloud2 >::getIndices | ( | ) | [inline] |
Get a pointer to the vector of indices used.
Definition at line 329 of file pcl_base.h.
| PointCloud2ConstPtr const pcl::PCLBase< sensor_msgs::PointCloud2 >::getInputCloud | ( | ) | [inline] |
Get a pointer to the input point cloud dataset.
Definition at line 303 of file pcl_base.h.
| bool pcl::PCLBase< sensor_msgs::PointCloud2 >::initCompute | ( | ) | [protected] |
Definition at line 113 of file pcl_base.cpp.
| void pcl::PCLBase< sensor_msgs::PointCloud2 >::setIndices | ( | const IndicesPtr & | indices | ) | [inline] |
Provide a pointer to the vector of indices that represents the input data.
- Parameters:
-
indices a pointer to the vector of indices that represents the input data.
Definition at line 309 of file pcl_base.h.
| void pcl::PCLBase< sensor_msgs::PointCloud2 >::setIndices | ( | const PointIndicesConstPtr & | indices | ) | [inline] |
Provide a pointer to the vector of indices that represents the input data.
- Parameters:
-
indices a pointer to the vector of indices that represents the input data.
Definition at line 320 of file pcl_base.h.
| void pcl::PCLBase< sensor_msgs::PointCloud2 >::setInputCloud | ( | const PointCloud2ConstPtr & | cloud | ) |
Provide a pointer to the input dataset.
- Parameters:
-
cloud the const boost shared pointer to a PointCloud message
Definition at line 44 of file pcl_base.cpp.
Member Data Documentation
bool pcl::PCLBase< sensor_msgs::PointCloud2 >::fake_indices_ [protected] |
If no set of indices are given, we construct a set of fake indices that mimic the input PointCloud.
Definition at line 342 of file pcl_base.h.
std::vector<int> pcl::PCLBase< sensor_msgs::PointCloud2 >::field_sizes_ [protected] |
The size of each individual field.
Definition at line 345 of file pcl_base.h.
IndicesPtr pcl::PCLBase< sensor_msgs::PointCloud2 >::indices_ [protected] |
A pointer to the vector of point indices to use.
Definition at line 336 of file pcl_base.h.
PointCloud2ConstPtr pcl::PCLBase< sensor_msgs::PointCloud2 >::input_ [protected] |
The input point cloud dataset.
Definition at line 333 of file pcl_base.h.
bool pcl::PCLBase< sensor_msgs::PointCloud2 >::use_indices_ [protected] |
Set to true if point indices are used.
Definition at line 339 of file pcl_base.h.
std::string pcl::PCLBase< sensor_msgs::PointCloud2 >::x_field_name_ [protected] |
The desired x-y-z field names.
Definition at line 351 of file pcl_base.h.
int pcl::PCLBase< sensor_msgs::PointCloud2 >::x_idx_ [protected] |
The x-y-z fields indices.
Definition at line 348 of file pcl_base.h.
std::string pcl::PCLBase< sensor_msgs::PointCloud2 >::y_field_name_ [protected] |
Definition at line 351 of file pcl_base.h.
int pcl::PCLBase< sensor_msgs::PointCloud2 >::y_idx_ [protected] |
Definition at line 348 of file pcl_base.h.
std::string pcl::PCLBase< sensor_msgs::PointCloud2 >::z_field_name_ [protected] |
Definition at line 351 of file pcl_base.h.
int pcl::PCLBase< sensor_msgs::PointCloud2 >::z_idx_ [protected] |
Definition at line 348 of file pcl_base.h.
The documentation for this class was generated from the following files: