IntensitySpinEstimation estimates the intensity-domain spin image descriptors for a given point cloud dataset containing points and intensity. For more information about the intensity-domain spin image descriptor, see: More...
#include <intensity_spin.h>
Public Types | |
| typedef pcl::PointCloud< PointInT > | PointCloudIn |
| typedef Feature< PointInT, PointOutT >::PointCloudOut | PointCloudOut |
Public Member Functions | |
| void | computeFeature (PointCloudOut &output) |
| Estimate the intensity-domain descriptors at a set of points given by <setInputCloud (), setIndices ()> using the surface in setSearchSurface (), and the spatial locator in setSearchMethod (). | |
| void | computeIntensitySpinImage (const PointCloudIn &cloud, float radius, float sigma, int k, const std::vector< int > &indices, const std::vector< float > &squared_distances, Eigen::MatrixXf &intensity_spin_image) |
| Estimate the intensity-domain spin image descriptor for a given point based on its spatial neighborhood of 3D points and their intensities. | |
| int | getNrDistanceBins () |
| Returns the number of bins in the distance dimension of the spin image. | |
| int | getNrIntensityBins () |
| Returns the number of bins in the intensity dimension of the spin image. | |
| float | getSmoothingBandwith () |
| Returns the standard deviation of the Gaussian smoothing kernel used to construct the spin images. | |
| IntensitySpinEstimation () | |
| Empty constructor. | |
| void | setNrDistanceBins (size_t nr_distance_bins) |
| Set the number of bins to use in the distance dimension of the spin image. | |
| void | setNrIntensityBins (size_t nr_intensity_bins) |
| Set the number of bins to use in the intensity dimension of the spin image. | |
| void | setSmoothingBandwith (float sigma) |
| Set the standard deviation of the Gaussian smoothing kernel to use when constructing the spin images. | |
Public Attributes | |
| int | nr_distance_bins_ |
| The number of distance bins in the descriptor. | |
| int | nr_intensity_bins_ |
| The number of intensity bins in the descriptor. | |
| float | sigma_ |
| The standard deviation of the Gaussian smoothing kernel used to construct the spin images. | |
Private Member Functions | |
| void | computeFeatureEigen (pcl::PointCloud< Eigen::MatrixXf > &) |
| Make the computeFeature (&Eigen::MatrixXf); inaccessible from outside the class. | |
Detailed Description
template<typename PointInT, typename PointOutT>
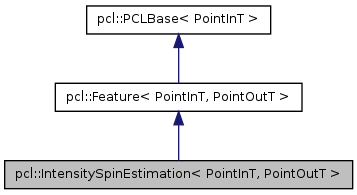
class pcl::IntensitySpinEstimation< PointInT, PointOutT >
IntensitySpinEstimation estimates the intensity-domain spin image descriptors for a given point cloud dataset containing points and intensity. For more information about the intensity-domain spin image descriptor, see:
Svetlana Lazebnik, Cordelia Schmid, and Jean Ponce. A sparse texture representation using local affine regions. In IEEE Transactions on Pattern Analysis and Machine Intelligence, volume 27, pages 1265-1278, August 2005.
Definition at line 57 of file intensity_spin.h.
Member Typedef Documentation
| typedef pcl::PointCloud<PointInT> pcl::IntensitySpinEstimation< PointInT, PointOutT >::PointCloudIn |
Reimplemented from pcl::Feature< PointInT, PointOutT >.
Definition at line 70 of file intensity_spin.h.
| typedef Feature<PointInT, PointOutT>::PointCloudOut pcl::IntensitySpinEstimation< PointInT, PointOutT >::PointCloudOut |
Reimplemented from pcl::Feature< PointInT, PointOutT >.
Definition at line 71 of file intensity_spin.h.
Constructor & Destructor Documentation
| pcl::IntensitySpinEstimation< PointInT, PointOutT >::IntensitySpinEstimation | ( | ) | [inline] |
Empty constructor.
Definition at line 74 of file intensity_spin.h.
Member Function Documentation
| void pcl::IntensitySpinEstimation< PointInT, PointOutT >::computeFeature | ( | PointCloudOut & | output | ) | [virtual] |
Estimate the intensity-domain descriptors at a set of points given by <setInputCloud (), setIndices ()> using the surface in setSearchSurface (), and the spatial locator in setSearchMethod ().
- Parameters:
-
[out] output the resultant point cloud model dataset that contains the intensity-domain spin image features
Implements pcl::Feature< PointInT, PointOutT >.
Definition at line 109 of file intensity_spin.hpp.
| void pcl::IntensitySpinEstimation< PointInT, PointOutT >::computeFeatureEigen | ( | pcl::PointCloud< Eigen::MatrixXf > & | ) | [inline, private, virtual] |
Make the computeFeature (&Eigen::MatrixXf); inaccessible from outside the class.
- Parameters:
-
[out] output the output point cloud
Implements pcl::Feature< PointInT, PointOutT >.
Reimplemented in pcl::IntensitySpinEstimation< PointInT, Eigen::MatrixXf >.
Definition at line 148 of file intensity_spin.h.
| void pcl::IntensitySpinEstimation< PointInT, PointOutT >::computeIntensitySpinImage | ( | const PointCloudIn & | cloud, |
| float | radius, | ||
| float | sigma, | ||
| int | k, | ||
| const std::vector< int > & | indices, | ||
| const std::vector< float > & | squared_distances, | ||
| Eigen::MatrixXf & | intensity_spin_image | ||
| ) |
Estimate the intensity-domain spin image descriptor for a given point based on its spatial neighborhood of 3D points and their intensities.
- Parameters:
-
[in] cloud the dataset containing the Cartesian coordinates and intensity values of the points [in] radius the radius of the feature [in] sigma the standard deviation of the Gaussian smoothing kernel to use during the soft histogram update [in] k the number of neighbors to use from indices and squared_distances [in] indices the indices of the points that comprise the query point's neighborhood [in] squared_distances the squared distances from the query point to each point in the neighborhood [out] intensity_spin_image the resultant intensity-domain spin image descriptor
Definition at line 47 of file intensity_spin.hpp.
| int pcl::IntensitySpinEstimation< PointInT, PointOutT >::getNrDistanceBins | ( | ) | [inline] |
Returns the number of bins in the distance dimension of the spin image.
Definition at line 104 of file intensity_spin.h.
| int pcl::IntensitySpinEstimation< PointInT, PointOutT >::getNrIntensityBins | ( | ) | [inline] |
Returns the number of bins in the intensity dimension of the spin image.
Definition at line 114 of file intensity_spin.h.
| float pcl::IntensitySpinEstimation< PointInT, PointOutT >::getSmoothingBandwith | ( | ) | [inline] |
Returns the standard deviation of the Gaussian smoothing kernel used to construct the spin images.
Definition at line 124 of file intensity_spin.h.
| void pcl::IntensitySpinEstimation< PointInT, PointOutT >::setNrDistanceBins | ( | size_t | nr_distance_bins | ) | [inline] |
Set the number of bins to use in the distance dimension of the spin image.
- Parameters:
-
[in] nr_distance_bins the number of bins to use in the distance dimension of the spin image
Definition at line 100 of file intensity_spin.h.
| void pcl::IntensitySpinEstimation< PointInT, PointOutT >::setNrIntensityBins | ( | size_t | nr_intensity_bins | ) | [inline] |
Set the number of bins to use in the intensity dimension of the spin image.
- Parameters:
-
[in] nr_intensity_bins the number of bins to use in the intensity dimension of the spin image
Definition at line 110 of file intensity_spin.h.
| void pcl::IntensitySpinEstimation< PointInT, PointOutT >::setSmoothingBandwith | ( | float | sigma | ) | [inline] |
Set the standard deviation of the Gaussian smoothing kernel to use when constructing the spin images.
- Parameters:
-
[in] sigma the standard deviation of the Gaussian smoothing kernel to use when constructing the spin images
Definition at line 120 of file intensity_spin.h.
Member Data Documentation
| int pcl::IntensitySpinEstimation< PointInT, PointOutT >::nr_distance_bins_ |
The number of distance bins in the descriptor.
Definition at line 135 of file intensity_spin.h.
| int pcl::IntensitySpinEstimation< PointInT, PointOutT >::nr_intensity_bins_ |
The number of intensity bins in the descriptor.
Definition at line 138 of file intensity_spin.h.
| float pcl::IntensitySpinEstimation< PointInT, PointOutT >::sigma_ |
The standard deviation of the Gaussian smoothing kernel used to construct the spin images.
Definition at line 141 of file intensity_spin.h.
The documentation for this class was generated from the following files: