The default SubscriberPlugin. More...
#include <raw_subscriber.h>
Public Member Functions | |
| virtual std::string | getTransportName () const |
| Get a string identifier for the transport provided by this plugin. | |
| virtual | ~RawSubscriber () |
Protected Member Functions | |
| virtual std::string | getTopicToSubscribe (const std::string &base_topic) const |
| Return the communication topic name for a given base topic. | |
| virtual void | internalCallback (const sensor_msgs::ImageConstPtr &message, const Callback &user_cb) |
Detailed Description
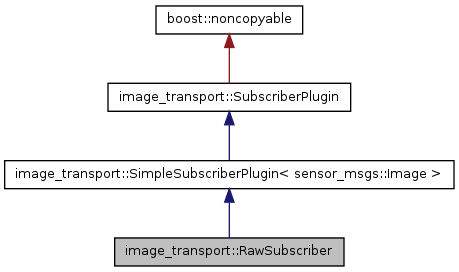
The default SubscriberPlugin.
RawSubscriber is a simple wrapper for ros::Subscriber which listens for Image messages and passes them through to the callback.
Definition at line 48 of file raw_subscriber.h.
Constructor & Destructor Documentation
| virtual image_transport::RawSubscriber::~RawSubscriber | ( | ) | [inline, virtual] |
Definition at line 51 of file raw_subscriber.h.
Member Function Documentation
| virtual std::string image_transport::RawSubscriber::getTopicToSubscribe | ( | const std::string & | base_topic | ) | const [inline, protected, virtual] |
Return the communication topic name for a given base topic.
Defaults to <base topic>/<transport name>.
Reimplemented from image_transport::SimpleSubscriberPlugin< sensor_msgs::Image >.
Definition at line 64 of file raw_subscriber.h.
| virtual std::string image_transport::RawSubscriber::getTransportName | ( | ) | const [inline, virtual] |
Get a string identifier for the transport provided by this plugin.
Implements image_transport::SubscriberPlugin.
Definition at line 53 of file raw_subscriber.h.
| virtual void image_transport::RawSubscriber::internalCallback | ( | const sensor_msgs::ImageConstPtr & | message, |
| const Callback & | user_cb | ||
| ) | [inline, protected, virtual] |
Definition at line 59 of file raw_subscriber.h.
The documentation for this class was generated from the following file: