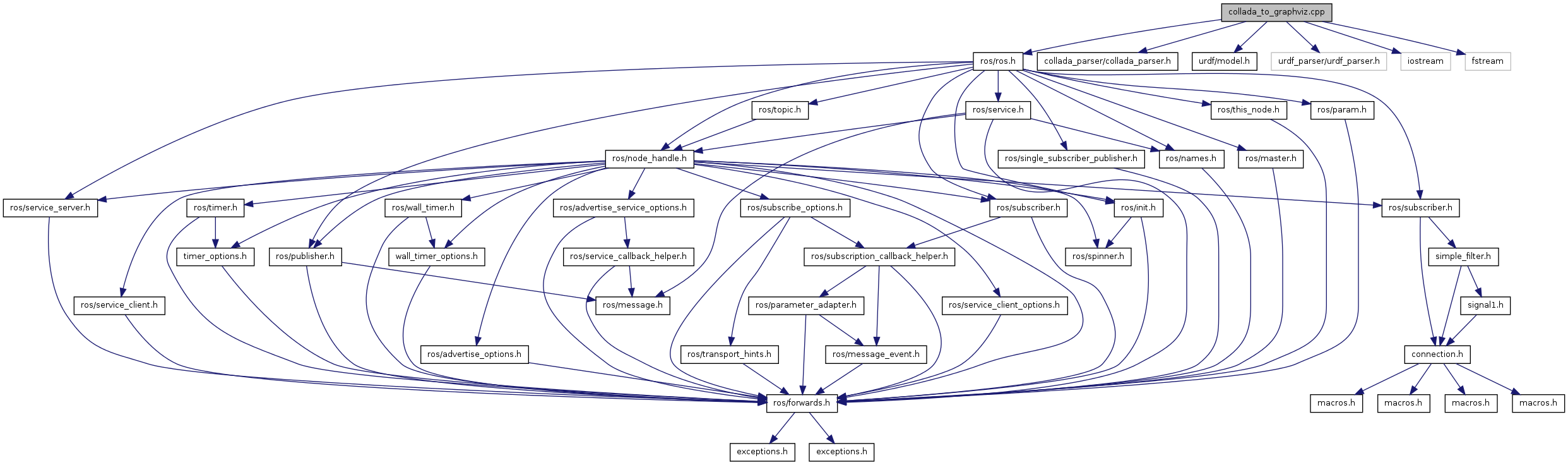
#include <ros/ros.h>#include "collada_parser/collada_parser.h"#include "urdf/model.h"#include "urdf_parser/urdf_parser.h"#include <iostream>#include <fstream>
Include dependency graph for collada_to_graphviz.cpp:
Go to the source code of this file.
Defines | |
| #define | PRINT_GEOM(os, geometry) if ( geometry->type == urdf::Geometry::MESH ) { os << "geom: name: " << ((urdf::Mesh *)geometry.get())->filename; } |
| #define | PRINT_ORIGIN(os, origin) |
| #define | PRINT_ORIGIN_XML(os, origin) |
Functions | |
| void | addChildJointNames (boost::shared_ptr< const Link > link, ofstream &os) |
| void | addChildLinkNames (boost::shared_ptr< const Link > link, ofstream &os) |
| int | main (int argc, char **argv) |
| void | printTree (boost::shared_ptr< const Link > link, string file) |
Define Documentation
| #define PRINT_GEOM | ( | os, | |
| geometry | |||
| ) | if ( geometry->type == urdf::Geometry::MESH ) { os << "geom: name: " << ((urdf::Mesh *)geometry.get())->filename; } |
Definition at line 55 of file collada_to_graphviz.cpp.
| #define PRINT_ORIGIN | ( | os, | |
| origin | |||
| ) |
Value:
os << "xyz: " << origin.position.x << " " << origin.position.y << " " << origin.position.z << " "; \ { double r,p,y; origin.rotation.getRPY(r, p, y); \ os << "rpy: " << r << " " << p << " " << y; }
Definition at line 46 of file collada_to_graphviz.cpp.
| #define PRINT_ORIGIN_XML | ( | os, | |
| origin | |||
| ) |
Value:
os << "xyz=\"" << origin.position.x << " " << origin.position.y << " " << origin.position.z << "\""; \ { double r,p,y; origin.rotation.getRPY(r, p, y); os << " rpy=\"" << r << " " << p << " " << y << "\""; }
Definition at line 51 of file collada_to_graphviz.cpp.
Function Documentation
| void addChildJointNames | ( | boost::shared_ptr< const Link > | link, |
| ofstream & | os | ||
| ) |
Definition at line 105 of file collada_to_graphviz.cpp.
| void addChildLinkNames | ( | boost::shared_ptr< const Link > | link, |
| ofstream & | os | ||
| ) |
Definition at line 58 of file collada_to_graphviz.cpp.
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 139 of file collada_to_graphviz.cpp.
Definition at line 123 of file collada_to_graphviz.cpp.