#include <SRiteratedextendedkalmanfilter.h>
Public Member Functions | |
| virtual void | CalculateCovariance (MatrixWrapper::Matrix &R_vf, MatrixWrapper::Matrix &H_i, MatrixWrapper::Matrix &invS, MatrixWrapper::Matrix &SR) |
| Calculate the covariance of the new state estimate (P_k) | |
| virtual void | CalculateMatrix (MatrixWrapper::Matrix &H_i, MatrixWrapper::SymmetricMatrix &R_i, MatrixWrapper::Matrix &invS, MatrixWrapper::Matrix &Sr, MatrixWrapper::Matrix &K_i) |
| Calculate K_i , invS and Sr. | |
| virtual void | CalculateMean (MatrixWrapper::ColumnVector &x_k, const MatrixWrapper::ColumnVector &z, MatrixWrapper::ColumnVector &Z_i, MatrixWrapper::Matrix &K_i) |
| Calculate the new state estimate. | |
| virtual void | CalculateMeasUpdate (MatrixWrapper::ColumnVector z, MatrixWrapper::ColumnVector Z, MatrixWrapper::Matrix H, MatrixWrapper::SymmetricMatrix R) |
| virtual void | MeasUpdate (MeasurementModel< MatrixWrapper::ColumnVector, MatrixWrapper::ColumnVector > *const measmodel, const MatrixWrapper::ColumnVector &z, const MatrixWrapper::ColumnVector &s) |
| Perform a measurement update use a measurement model, measurements z and virutal measurements s. | |
| virtual void | MeasUpdate (MeasurementModel< MatrixWrapper::ColumnVector, MatrixWrapper::ColumnVector > *const measmodel, const MatrixWrapper::ColumnVector &z) |
| Perform a measurement update use a measurement model, measurements z. | |
| void | PriorSet (MatrixWrapper::ColumnVector &X, MatrixWrapper::SymmetricMatrix &P) |
| Set mean and covariance of the state estimation to a specific value. | |
| MatrixWrapper::Matrix | SRCovarianceGet () const |
| Returns a square root of the covariance of the measurement input u. | |
| void | SRCovarianceSet (MatrixWrapper::Matrix JP_new) |
| Set the square root covariance to a specific value. | |
| SRIteratedExtendedKalmanFilter (Gaussian *prior, unsigned int nr_it=1) | |
| virtual void | SysUpdate (SystemModel< MatrixWrapper::ColumnVector > *const sysmodel, const MatrixWrapper::ColumnVector &u) |
| Perform a system update with the current measurement model ans system model using an input u. | |
| virtual void | SysUpdate (SystemModel< MatrixWrapper::ColumnVector > *const sysmodel) |
| Perform a system update with the current measurement model and system model. | |
| virtual | ~SRIteratedExtendedKalmanFilter () |
| Destructor. | |
Private Attributes | |
| MatrixWrapper::Matrix | JP |
the upper triangular matrix cholesky decompostion of the state covariance (  ) ) | |
| unsigned int | nr_iterations |
| Variable indicating the number of iterations of the filter. | |
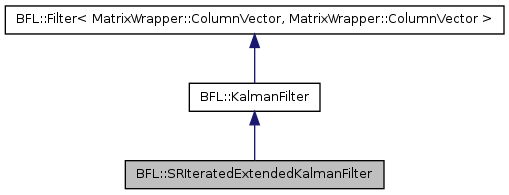
Detailed Description
This is a class implementing the Kalman Filter (KF) class for Square Root Iterated Extended Kalman Filters. this is a possible implementation of a Kalman filter, which in will yield better numerical stable results, since the covariance matrix is defined as the Square root of the Covariance matrix of the state estimation. See
@Book{ Anderson_auxiliary,
author = {Anderson, B.D.O. and Moore, J.B.},
title = {Optimal filtering},
publisher = {Prentice-Hall, Englewood Cliffs, NJ },
year = {1979}
}
for more details. Note that this particular implementation:
- Currently only works for implicit measurement model (LinearAnalyticMeasurementModelGaussianUncertainty_Implicit) the implicit measurement model is described as :
and internally defined as a linear measurement model with virtual measurement z_k^{virtual}![\[ 0 = f (x,z) \]](form_12.png)
![\[ z_k^{virtual} = H(x_k,z_k) \times x_k + N(\mu(x_{k},z_k) ,\Sigma(x_k,z_k)) \]](form_13.png)
- See also:
- KalmanFilter
Definition at line 53 of file SRiteratedextendedkalmanfilter.h.
Constructor & Destructor Documentation
| BFL::SRIteratedExtendedKalmanFilter::SRIteratedExtendedKalmanFilter | ( | Gaussian * | prior, |
| unsigned int | nr_it = 1 |
||
| ) |
Constructor
- Precondition:
- you created the prior
- Parameters:
-
prior pointer to the Monte Carlo Pdf prior density nr_it the number of iterations in one update
Definition at line 29 of file SRiteratedextendedkalmanfilter.cpp.
Destructor.
Definition at line 36 of file SRiteratedextendedkalmanfilter.cpp.
Member Function Documentation
| void BFL::SRIteratedExtendedKalmanFilter::CalculateCovariance | ( | MatrixWrapper::Matrix & | R_vf, |
| MatrixWrapper::Matrix & | H_i, | ||
| MatrixWrapper::Matrix & | invS, | ||
| MatrixWrapper::Matrix & | SR | ||
| ) | [virtual] |
Calculate the covariance of the new state estimate (P_k)
![\[ JP = JP-JP*JP^{'}*H_k^{'}*inv(S)^{'}*inv(R+Sr)*H_k*JP \]](form_21.png)
![\[ P_k=JP*JP^{'} \]](form_22.png)
Definition at line 221 of file SRiteratedextendedkalmanfilter.cpp.
| void BFL::SRIteratedExtendedKalmanFilter::CalculateMatrix | ( | MatrixWrapper::Matrix & | H_i, |
| MatrixWrapper::SymmetricMatrix & | R_i, | ||
| MatrixWrapper::Matrix & | invS, | ||
| MatrixWrapper::Matrix & | Sr, | ||
| MatrixWrapper::Matrix & | K_i | ||
| ) | [virtual] |
![\[ Sr= cholesky(H_i*JP*JP^{'}*H_i^{'}+R_i)^{'} \]](form_18.png)
![\[ invS=inv(Sr)\]](form_19.png)
![\[ K_i=JP*JP^{'}*H_i^{'}*invS^{'}*invS \]](form_20.png)
| void BFL::SRIteratedExtendedKalmanFilter::CalculateMean | ( | MatrixWrapper::ColumnVector & | x_k, |
| const MatrixWrapper::ColumnVector & | z, | ||
| MatrixWrapper::ColumnVector & | Z_i, | ||
| MatrixWrapper::Matrix & | K_i | ||
| ) | [virtual] |
Calculate the new state estimate.
![\[ x_k = x_{k-} + K.(z - Z) \]](form_8.png)
Definition at line 213 of file SRiteratedextendedkalmanfilter.cpp.
| void BFL::SRIteratedExtendedKalmanFilter::CalculateMeasUpdate | ( | MatrixWrapper::ColumnVector | z, |
| MatrixWrapper::ColumnVector | Z, | ||
| MatrixWrapper::Matrix | H, | ||
| MatrixWrapper::SymmetricMatrix | R | ||
| ) | [virtual] |
Calculate Kalman filter Measurement Update
![\[ S=(H_k*J_k*J_k^{'}*H_k+D*R*D^{'})^{'} \]](form_14.png)
![\[ Sr=cholesky(S)^{'}\]](form_15.png)
![\[ J_k = J_k-J_k*J_k^{'}*H^{'}*inv(S)^{'}*inv(R+Sr)*H_k*J_k \]](form_16.png)
with
![\[ K = J_{k}*J_{k}^{'}*H'*inv(S)^{'}*inv(S) \]](form_17.png)
Definition at line 169 of file SRiteratedextendedkalmanfilter.cpp.
| void BFL::SRIteratedExtendedKalmanFilter::MeasUpdate | ( | MeasurementModel< MatrixWrapper::ColumnVector, MatrixWrapper::ColumnVector > *const | measmodel, |
| const MatrixWrapper::ColumnVector & | z, | ||
| const MatrixWrapper::ColumnVector & | s | ||
| ) | [virtual] |
Perform a measurement update use a measurement model, measurements z and virutal measurements s.
Implements BFL::KalmanFilter.
Definition at line 66 of file SRiteratedextendedkalmanfilter.cpp.
| virtual void BFL::SRIteratedExtendedKalmanFilter::MeasUpdate | ( | MeasurementModel< MatrixWrapper::ColumnVector, MatrixWrapper::ColumnVector > *const | measmodel, |
| const MatrixWrapper::ColumnVector & | z | ||
| ) | [virtual] |
Perform a measurement update use a measurement model, measurements z.
| void BFL::SRIteratedExtendedKalmanFilter::PriorSet | ( | MatrixWrapper::ColumnVector & | X, |
| MatrixWrapper::SymmetricMatrix & | P | ||
| ) |
Set mean and covariance of the state estimation to a specific value.
Definition at line 163 of file SRiteratedextendedkalmanfilter.cpp.
| Matrix BFL::SRIteratedExtendedKalmanFilter::SRCovarianceGet | ( | ) | const |
Returns a square root of the covariance of the measurement input u.
Definition at line 153 of file SRiteratedextendedkalmanfilter.cpp.
| void BFL::SRIteratedExtendedKalmanFilter::SRCovarianceSet | ( | MatrixWrapper::Matrix | JP_new | ) |
Set the square root covariance to a specific value.
Definition at line 158 of file SRiteratedextendedkalmanfilter.cpp.
| void BFL::SRIteratedExtendedKalmanFilter::SysUpdate | ( | SystemModel< MatrixWrapper::ColumnVector > *const | sysmodel, |
| const MatrixWrapper::ColumnVector & | u | ||
| ) | [virtual] |
Perform a system update with the current measurement model ans system model using an input u.
Implements BFL::KalmanFilter.
Definition at line 39 of file SRiteratedextendedkalmanfilter.cpp.
| void BFL::SRIteratedExtendedKalmanFilter::SysUpdate | ( | SystemModel< MatrixWrapper::ColumnVector > *const | sysmodel | ) | [virtual] |
Perform a system update with the current measurement model and system model.
Definition at line 59 of file SRiteratedextendedkalmanfilter.cpp.
Member Data Documentation
MatrixWrapper::Matrix BFL::SRIteratedExtendedKalmanFilter::JP [private] |
the upper triangular matrix cholesky decompostion of the state covariance ( )
Definition at line 118 of file SRiteratedextendedkalmanfilter.h.
unsigned int BFL::SRIteratedExtendedKalmanFilter::nr_iterations [private] |
Variable indicating the number of iterations of the filter.
Definition at line 116 of file SRiteratedextendedkalmanfilter.h.
The documentation for this class was generated from the following files: