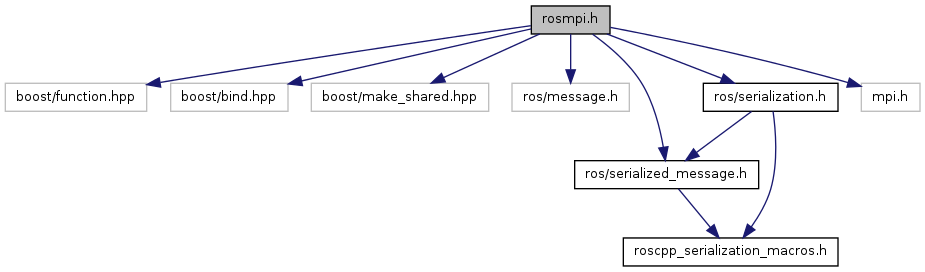
#include <boost/function.hpp>#include <boost/bind.hpp>#include <boost/make_shared.hpp>#include <ros/message.h>#include <ros/serialized_message.h>#include <ros/serialization.h>#include <mpi.h>
Include dependency graph for rosmpi.h:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| namespace | rosmpi |
| namespace | rosmpi::communicator |
| namespace | rosmpi::init_options |
Flags for ROS MPI initialization. | |
| namespace | rosmpi::this_processor |
Typedefs | |
| typedef init_options::InitOption | rosmpi::InitOption |
Enumerations | |
| enum | rosmpi::init_options::InitOption { rosmpi::init_options::ThreadSingle = 0, rosmpi::init_options::ThreadFunneled = 1, rosmpi::init_options::ThreadSerialized = 2, rosmpi::init_options::ThreadMultiple = 3 } |
Functions | |
| const std::string | rosmpi::this_processor::getName () |
| Gets the name of this processor. | |
| int | rosmpi::communicator::getRank () |
| Determines the rank of the calling process in the communicator. | |
| int | rosmpi::communicator::getSize () |
| Returns the size of the group associated with a communicator. | |
| void | rosmpi::init (int &argc, char **argv, uint32_t options=0) |
| ROS MPI initialization function. | |
| void | rosmpi::shutdown () |
| void | rosmpi::spin () |