#include "ros/ros.h"#include <iostream>#include <list>#include <map>#include "ros/time.h"#include "ros/duration.h"#include "ros/console.h"#include "CsSubscriber.h"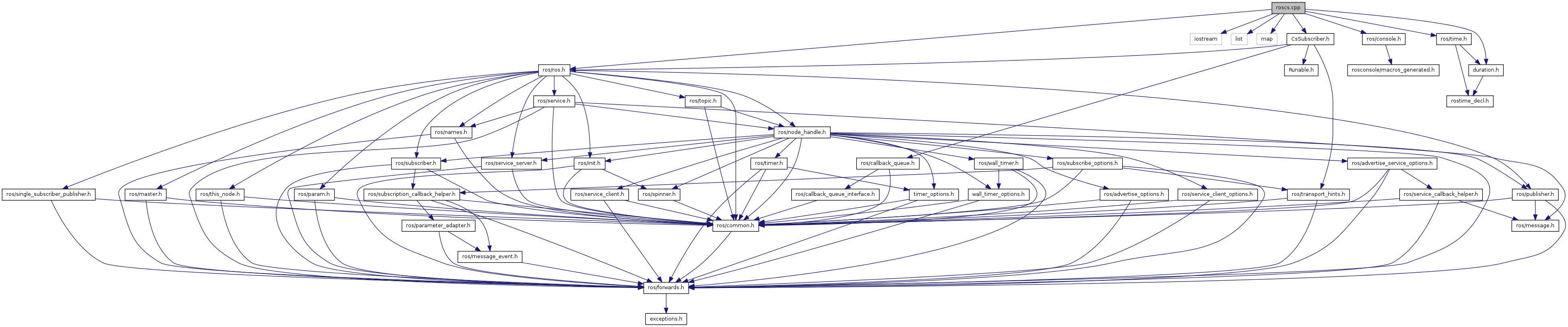
Go to the source code of this file.
Functions | |
| ros::Publisher * | advertiseTopic (ros::NodeHandle *node, char *topic, uint64_t messageId, int queueSize) |
| bool | checkMaster () |
| void | deleteParam (ros::NodeHandle *node, char *paramName) |
| void | destroyNode (ros::NodeHandle *node) |
| void | freeCharPtr (char *p) |
| ros::NodeHandle * | getNode (char *name) |
| char * | getParam (ros::NodeHandle *node, char *paramName) |
| uint64_t | getRosNow () |
| bool | getRosOk () |
| bool | hasParam (ros::NodeHandle *node, char *paramName) |
| <?cppMessageHandleMethods?> <?cppSubscriptionMethods?> bool | isNodeOk (ros::NodeHandle *node) |
| void | rosDebug (char *str) |
| void | rosError (char *str) |
| void | rosFatal (char *str) |
| void | rosInfo (char *str) |
| void | rosInit (char *name, int argc, char **argv, uint32_t initOptions) |
| void | rosShutdown () |
| void | rosSleep (uint32_t ms) |
| void | rosWarn (char *str) |
| char * | searchParam (ros::NodeHandle *node, char *paramName) |
| <?cppGetSizeOfMessage?> <?cppArray2RosMethods?> void | sendmsg (ros::Publisher *pub, uint64_t messageId, int *data) |
| void | setParamBool (ros::NodeHandle *node, char *key, bool val) |
| void | setParamDouble (ros::NodeHandle *node, char *key, double val) |
| void | setParamInt (ros::NodeHandle *node, char *key, int val) |
| void | setParamString (ros::NodeHandle *node, char *key, char *val) |
| void | stopSubscriber (void **ptr) |
Variables | |
| list< ros::Subscriber > | subs |
Function Documentation
| ros::Publisher* advertiseTopic | ( | ros::NodeHandle * | node, |
| char * | topic, | ||
| uint64_t | messageId, | ||
| int | queueSize | ||
| ) |
Definition at line 70 of file messages/roscs.cpp.
| bool checkMaster | ( | ) |
Definition at line 54 of file messages/roscs.cpp.
| void deleteParam | ( | ros::NodeHandle * | node, |
| char * | paramName | ||
| ) |
Definition at line 149 of file messages/roscs.cpp.
| void destroyNode | ( | ros::NodeHandle * | node | ) |
Definition at line 63 of file messages/roscs.cpp.
| void freeCharPtr | ( | char * | p | ) |
Definition at line 170 of file messages/roscs.cpp.
| ros::NodeHandle* getNode | ( | char * | name | ) |
Definition at line 59 of file messages/roscs.cpp.
| char* getParam | ( | ros::NodeHandle * | node, |
| char * | paramName | ||
| ) |
Definition at line 124 of file messages/roscs.cpp.
| uint64_t getRosNow | ( | ) |
Definition at line 31 of file messages/roscs.cpp.
| bool getRosOk | ( | ) |
Definition at line 51 of file messages/roscs.cpp.
| bool hasParam | ( | ros::NodeHandle * | node, |
| char * | paramName | ||
| ) |
Definition at line 145 of file messages/roscs.cpp.
| <?cppMessageHandleMethods?><?cppSubscriptionMethods?> bool isNodeOk | ( | ros::NodeHandle * | node | ) |
Definition at line 101 of file messages/roscs.cpp.
| void rosDebug | ( | char * | str | ) |
Definition at line 105 of file messages/roscs.cpp.
| void rosError | ( | char * | str | ) |
Definition at line 111 of file messages/roscs.cpp.
| void rosFatal | ( | char * | str | ) |
Definition at line 114 of file messages/roscs.cpp.
| void rosInfo | ( | char * | str | ) |
Definition at line 117 of file messages/roscs.cpp.
| void rosInit | ( | char * | name, |
| int | argc, | ||
| char ** | argv, | ||
| uint32_t | initOptions | ||
| ) |
Definition at line 41 of file messages/roscs.cpp.
| void rosShutdown | ( | ) |
Definition at line 48 of file messages/roscs.cpp.
| void rosSleep | ( | uint32_t | ms | ) |
Definition at line 35 of file messages/roscs.cpp.
| void rosWarn | ( | char * | str | ) |
Definition at line 108 of file messages/roscs.cpp.
| char* searchParam | ( | ros::NodeHandle * | node, |
| char * | paramName | ||
| ) |
Definition at line 138 of file messages/roscs.cpp.
| <?cppGetSizeOfMessage?><?cppArray2RosMethods?> void sendmsg | ( | ros::Publisher * | pub, |
| uint64_t | messageId, | ||
| int * | data | ||
| ) |
Definition at line 89 of file messages/roscs.cpp.
| void setParamBool | ( | ros::NodeHandle * | node, |
| char * | key, | ||
| bool | val | ||
| ) |
Definition at line 157 of file messages/roscs.cpp.
| void setParamDouble | ( | ros::NodeHandle * | node, |
| char * | key, | ||
| double | val | ||
| ) |
Definition at line 161 of file messages/roscs.cpp.
| void setParamInt | ( | ros::NodeHandle * | node, |
| char * | key, | ||
| int | val | ||
| ) |
Definition at line 153 of file messages/roscs.cpp.
| void setParamString | ( | ros::NodeHandle * | node, |
| char * | key, | ||
| char * | val | ||
| ) |
Definition at line 165 of file messages/roscs.cpp.
| void stopSubscriber | ( | void ** | ptr | ) |
Definition at line 121 of file messages/roscs.cpp.
Variable Documentation
| list<ros::Subscriber> subs |
Definition at line 16 of file messages/roscs.cpp.