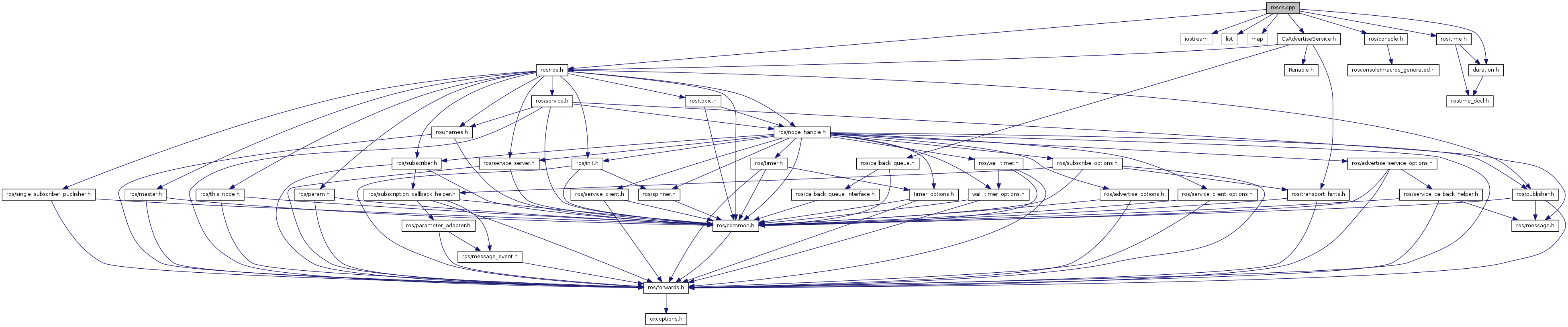
#include "ros/ros.h"#include <iostream>#include <list>#include <map>#include "ros/time.h"#include "ros/duration.h"#include "ros/console.h"#include "CsAdvertiseService.h"
Include dependency graph for services/roscs.cpp:
Go to the source code of this file.
Functions | |
| void | advertiseService (ros::NodeHandle *node, char *topic, uint64_t messageId, bool(*handle)(char **, char **), void(*handleFree)(char *)) |
| <?cppGetSizeOfMessage?> <?cppArray2RosMethods?> <?cppServiceHandleMethods?> bool | callservice (ros::ServiceClient *service, uint64_t messageId, int *request, char **response) |
| bool | checkMaster () |
| void | destroyService (ros::NodeHandle *node) |
| void | freePointer (char *pointer) |
| bool | getRosOk () |
| ros::NodeHandle * | getService (char *name) |
| bool | isServiceOk (ros::NodeHandle *node) |
| void | rosInit (char *name, int argc, char **argv, uint32_t initOptions) |
| void | rosShutdown () |
| ros::ServiceClient * | serviceClient (ros::NodeHandle *node, char *topic, uint64_t messageId) |
Variables | |
| list< ros::ServiceClient > | client |
Function Documentation
| void advertiseService | ( | ros::NodeHandle * | node, |
| char * | topic, | ||
| uint64_t | messageId, | ||
| bool(*)(char **, char **) | handle, | ||
| void(*)(char *) | handleFree | ||
| ) |
Definition at line 67 of file services/roscs.cpp.
| <?cppGetSizeOfMessage?><?cppArray2RosMethods?><?cppServiceHandleMethods?> bool callservice | ( | ros::ServiceClient * | service, |
| uint64_t | messageId, | ||
| int * | request, | ||
| char ** | response | ||
| ) |
Definition at line 58 of file services/roscs.cpp.
| bool checkMaster | ( | ) |
Definition at line 28 of file services/roscs.cpp.
| void destroyService | ( | ros::NodeHandle * | node | ) |
Definition at line 36 of file services/roscs.cpp.
| void freePointer | ( | char * | pointer | ) |
Definition at line 75 of file services/roscs.cpp.
| bool getRosOk | ( | ) |
Definition at line 25 of file services/roscs.cpp.
| ros::NodeHandle* getService | ( | char * | name | ) |
Definition at line 32 of file services/roscs.cpp.
| bool isServiceOk | ( | ros::NodeHandle * | node | ) |
Definition at line 79 of file services/roscs.cpp.
| void rosInit | ( | char * | name, |
| int | argc, | ||
| char ** | argv, | ||
| uint32_t | initOptions | ||
| ) |
Definition at line 15 of file services/roscs.cpp.
| void rosShutdown | ( | ) |
Definition at line 22 of file services/roscs.cpp.
| ros::ServiceClient* serviceClient | ( | ros::NodeHandle * | node, |
| char * | topic, | ||
| uint64_t | messageId | ||
| ) |
Definition at line 43 of file services/roscs.cpp.
Variable Documentation
| list<ros::ServiceClient> client |
Definition at line 13 of file services/roscs.cpp.