SE3 Vertex parameterized internally with a transformation matrix and externally with its exponential map. More...
#include <types_six_dof_expmap.h>
Public Member Functions | |
| Vector2d | cam_map (const Vector3d &trans_xyz) const |
| virtual void | oplus (double *update_) |
| update the position of the node from the parameters in v | |
| bool | read (std::istream &is) |
| read the vertex from a stream, i.e., the internal state of the vertex | |
| virtual void | setToOrigin () |
| sets the node to the origin (used in the multilevel stuff) | |
| Vector3d | stereocam_uvq_map (const Vector3d &trans_xyz) const |
| Vector3d | stereocam_uvu_map (const Vector3d &trans_xyz) const |
| EIGEN_MAKE_ALIGNED_OPERATOR_NEW | VertexSE3Expmap () |
| bool | write (std::ostream &os) const |
| write the vertex to a stream | |
Public Attributes | |
| double | _baseline |
| Vector2d | _focal_length |
| Vector2d | _principle_point |
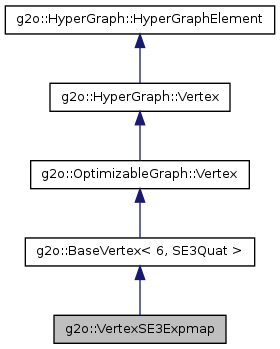
Detailed Description
SE3 Vertex parameterized internally with a transformation matrix and externally with its exponential map.
Definition at line 36 of file types_six_dof_expmap.h.
Constructor & Destructor Documentation
Definition at line 35 of file types_six_dof_expmap.cpp.
Member Function Documentation
| Vector2d g2o::VertexSE3Expmap::cam_map | ( | const Vector3d & | trans_xyz | ) | const [inline] |
Definition at line 69 of file types_six_dof_expmap.h.
| virtual void g2o::VertexSE3Expmap::oplus | ( | double * | v | ) | [inline, virtual] |
update the position of the node from the parameters in v
Implements g2o::OptimizableGraph::Vertex.
Definition at line 49 of file types_six_dof_expmap.h.
| bool g2o::VertexSE3Expmap::read | ( | std::istream & | is | ) | [virtual] |
read the vertex from a stream, i.e., the internal state of the vertex
Implements g2o::OptimizableGraph::Vertex.
Definition at line 44 of file types_six_dof_expmap.cpp.
| virtual void g2o::VertexSE3Expmap::setToOrigin | ( | ) | [inline, virtual] |
sets the node to the origin (used in the multilevel stuff)
Implements g2o::OptimizableGraph::Vertex.
Definition at line 45 of file types_six_dof_expmap.h.
| Vector3d g2o::VertexSE3Expmap::stereocam_uvq_map | ( | const Vector3d & | trans_xyz | ) | const [inline] |
Definition at line 80 of file types_six_dof_expmap.h.
| Vector3d g2o::VertexSE3Expmap::stereocam_uvu_map | ( | const Vector3d & | trans_xyz | ) | const [inline] |
Definition at line 94 of file types_six_dof_expmap.h.
| bool g2o::VertexSE3Expmap::write | ( | std::ostream & | os | ) | const [virtual] |
write the vertex to a stream
Implements g2o::OptimizableGraph::Vertex.
Definition at line 58 of file types_six_dof_expmap.cpp.
Member Data Documentation
Definition at line 66 of file types_six_dof_expmap.h.
| Vector2d g2o::VertexSE3Expmap::_focal_length |
Definition at line 65 of file types_six_dof_expmap.h.
Definition at line 64 of file types_six_dof_expmap.h.
The documentation for this class was generated from the following files: