Allows for control of the Kuka YouBot with a joystick. More...
#include <geometry_msgs/Twist.h>#include <ros/ros.h>#include <sensor_msgs/Joy.h>#include <youbot_teleop/youbot_joy_teleop.h>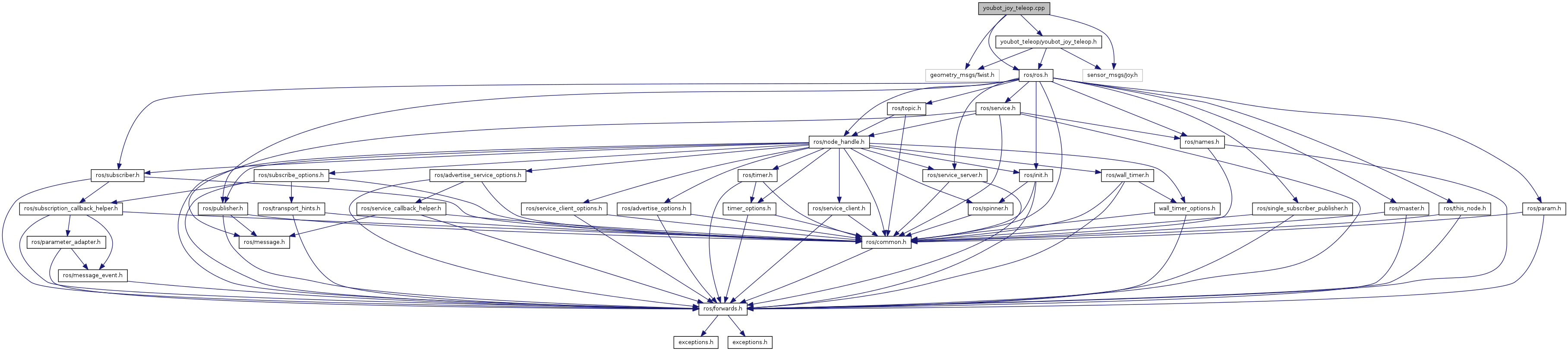
Go to the source code of this file.
Functions | |
| int | main (int argc, char **argv) |
Allows for control of the Kuka YouBot with a joystick.
youbot_joy_teleop creates a ROS node that allows the control of a Kuka YouBot with a joystick. This node listens to a /joy topic and sends messages to the /cmd_vel topic. Arm control is currently unimplemented.
Definition in file youbot_joy_teleop.cpp.
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Creates and runs the youbot_joy_teleop node.
| argc | argument count that is passed to ros::init |
| argv | arguments that are passed to ros::init |
Definition at line 84 of file youbot_joy_teleop.cpp.

