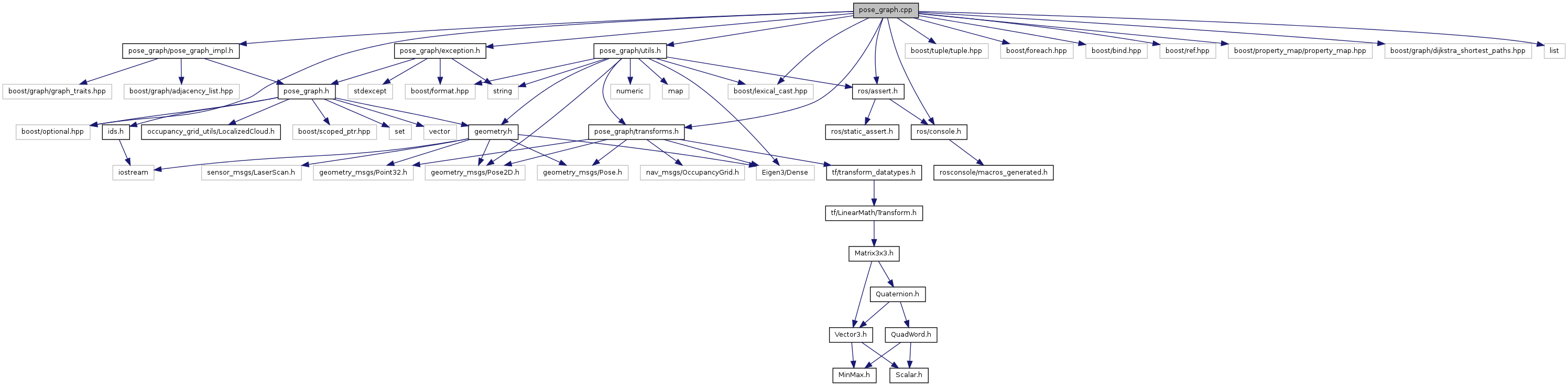
#include <pose_graph/pose_graph_impl.h>#include <pose_graph/exception.h>#include <pose_graph/utils.h>#include <pose_graph/transforms.h>#include <boost/tuple/tuple.hpp>#include <boost/foreach.hpp>#include <boost/bind.hpp>#include <boost/ref.hpp>#include <boost/property_map/property_map.hpp>#include <boost/graph/dijkstra_shortest_paths.hpp>#include <boost/lexical_cast.hpp>#include <ros/assert.h>#include <ros/console.h>#include <list>#include <boost/optional.hpp>
Include dependency graph for pose_graph.cpp:
Go to the source code of this file.
Namespaces | |
| namespace | pose_graph |
Typedefs | |
| typedef set< EdgeId > | pose_graph::EdgeIdSet |
| typedef pair< NodeId, NodeId > | pose_graph::IncidentNodes |
| typedef PoseGraphAdjacencyList::in_edge_iterator | pose_graph::InEdgeIter |
| typedef set< NodeId > | pose_graph::NodeIdSet |
| typedef PoseGraphAdjacencyList::out_edge_iterator | pose_graph::OutEdgeIter |
| typedef PoseGraphAdjacencyList::vertex_iterator | pose_graph::VertexIter |
Functions | |
| Pose | pose_graph::addRelativePose (const PoseGraphImpl *g, const Pose &pose, const EdgeId e) |
| EdgeId | pose_graph::edgeId (const PoseGraphAdjacencyList &graph, const PoseGraphEdge &e) |
| template<class K , class V > | |
| K | pose_graph::getKey (const pair< K, V > entry) |
| NodeId | pose_graph::vertexId (const PoseGraphAdjacencyList &graph, const PoseGraphVertex &v) |