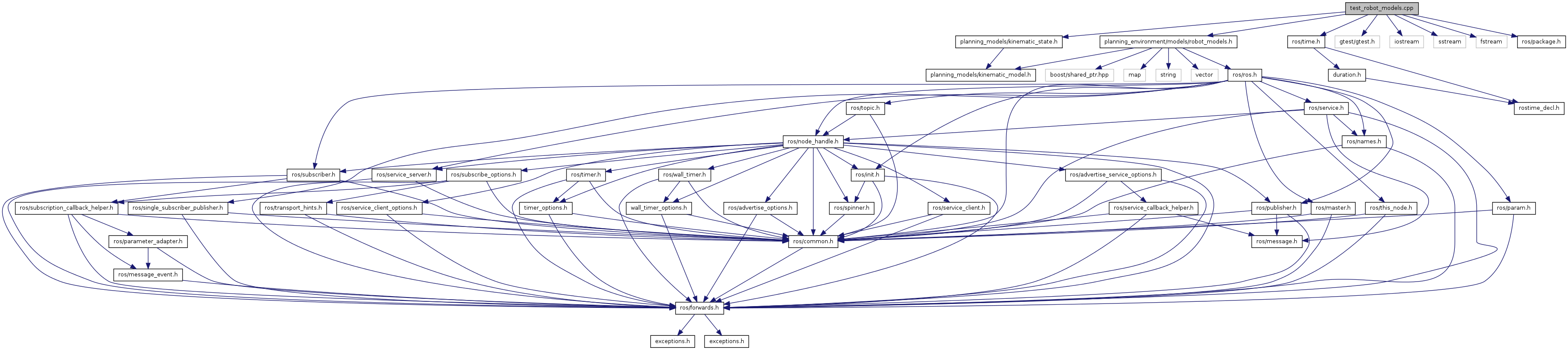
#include <planning_environment/models/robot_models.h>#include <planning_models/kinematic_state.h>#include <ros/time.h>#include <gtest/gtest.h>#include <iostream>#include <sstream>#include <fstream>#include <ros/package.h>
Include dependency graph for test_robot_models.cpp:
Go to the source code of this file.
Classes | |
| class | TestRobotModels |
Functions | |
| int | main (int argc, char **argv) |
| TEST_F (TestRobotModels, Loading) | |
| TEST_F (TestRobotModels, SetGetOperations) | |
| TEST_F (TestRobotModels, SetGetBounds) | |
| TEST_F (TestRobotModels, ForwardKinematics) | |
Variables | |
| static const std::string | FLOATING_JOINT_XML = "</value>" |
| static const std::string | rel_path = "/test_urdf/robot.xml" |
| static const std::string | RIGHT_ARM_GROUP_XML = "</value>" |
Function Documentation
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 299 of file test_robot_models.cpp.
| TEST_F | ( | TestRobotModels | , |
| Loading | |||
| ) |
Definition at line 123 of file test_robot_models.cpp.
| TEST_F | ( | TestRobotModels | , |
| SetGetOperations | |||
| ) |
Definition at line 160 of file test_robot_models.cpp.
| TEST_F | ( | TestRobotModels | , |
| SetGetBounds | |||
| ) |
Definition at line 226 of file test_robot_models.cpp.
| TEST_F | ( | TestRobotModels | , |
| ForwardKinematics | |||
| ) |
Definition at line 243 of file test_robot_models.cpp.
Variable Documentation
const std::string FLOATING_JOINT_XML = "</value>" [static] |
Definition at line 48 of file test_robot_models.cpp.
const std::string rel_path = "/test_urdf/robot.xml" [static] |
Definition at line 46 of file test_robot_models.cpp.
const std::string RIGHT_ARM_GROUP_XML = "</value>" [static] |
Definition at line 76 of file test_robot_models.cpp.