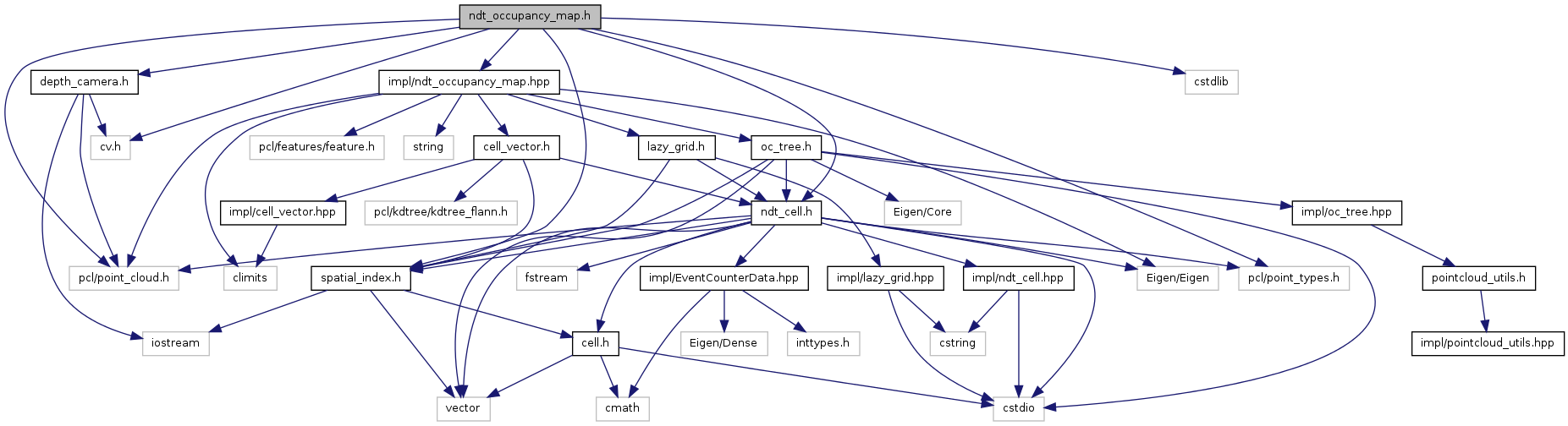
#include <spatial_index.h>#include <ndt_cell.h>#include <depth_camera.h>#include <cstdlib>#include <cv.h>#include <pcl/point_cloud.h>#include <pcl/point_types.h>#include <impl/ndt_occupancy_map.hpp>
Include dependency graph for ndt_occupancy_map.h:
Go to the source code of this file.
Classes | |
| class | lslgeneric::NDTOccupancyMap< PointT > |
| Implements an NDT based spatial index. More... | |
Namespaces | |
| namespace | lslgeneric |