#include <math.h>#include <ros/ros.h>#include <ros/package.h>#include <tf/transform_broadcaster.h>#include <kdl/frames.hpp>#include <std_msgs/String.h>#include <geometry_msgs/Twist.h>#include <nao_ctrl/MotionCommandBtn.h>#include <nao_ctrl/HeadAngles.h>#include <XnOpenNI.h>#include <XnCodecIDs.h>#include <XnCppWrapper.h>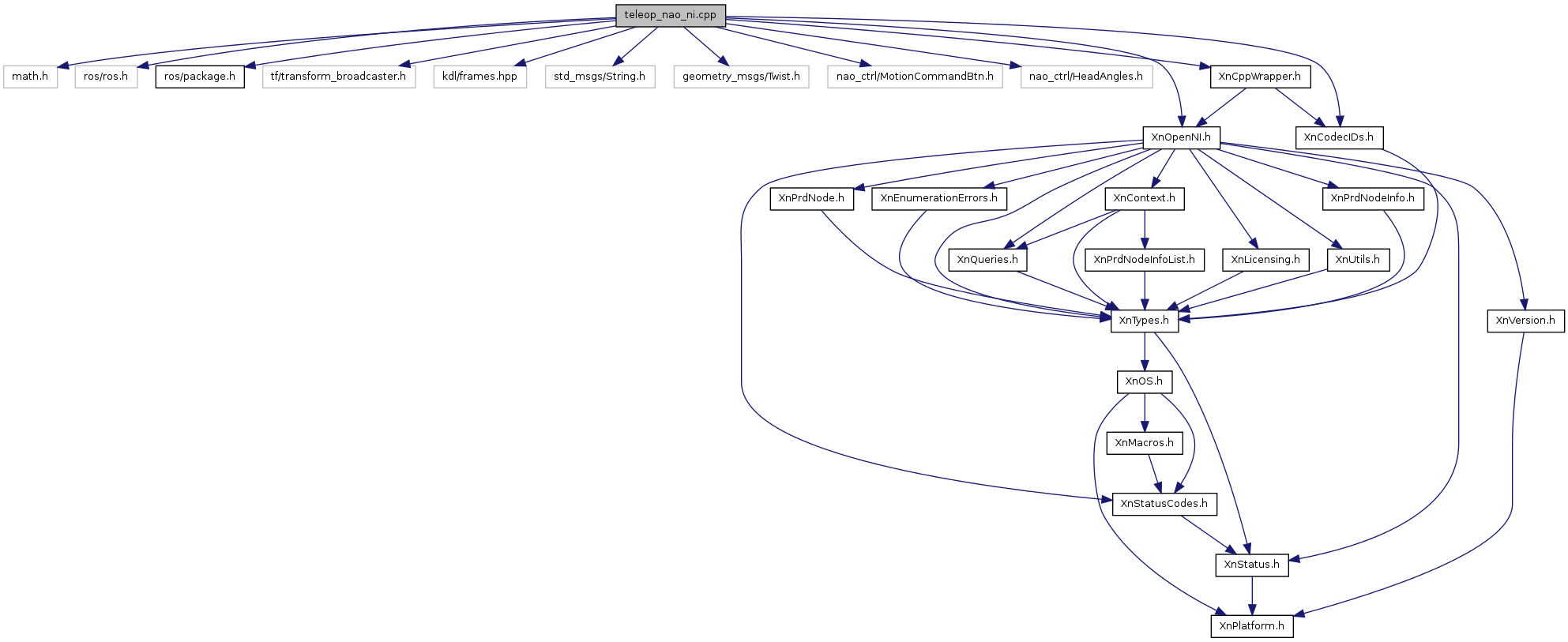
Go to the source code of this file.
Define Documentation
| #define CHECK_RC | ( | nRetVal, | |
| what | |||
| ) |
if (nRetVal != XN_STATUS_OK) \ { \ printf("%s failed: %s\n", what, xnGetStatusString(nRetVal)); \ return nRetVal; \ }
Definition at line 155 of file teleop_nao_ni.cpp.
| #define control_dist 300.0 |
Definition at line 166 of file teleop_nao_ni.cpp.
| #define control_rot 1.57 |
Definition at line 169 of file teleop_nao_ni.cpp.
| #define my_pi 3.141592653589793 |
Definition at line 162 of file teleop_nao_ni.cpp.
| #define rot_constant 0.04 |
Definition at line 172 of file teleop_nao_ni.cpp.
| #define rotating_speed 0.3 |
Definition at line 164 of file teleop_nao_ni.cpp.
| #define safety_dist 200.0 |
Definition at line 167 of file teleop_nao_ni.cpp.
| #define safety_rot 0.3 |
Definition at line 170 of file teleop_nao_ni.cpp.
| #define walking_speed 0.3 |
Definition at line 163 of file teleop_nao_ni.cpp.
Function Documentation
| void checkPose | ( | TeleopNaoNi & | obj | ) |
Definition at line 585 of file teleop_nao_ni.cpp.
| float getAngleBetweenLimbs | ( | XnUserID const & | user, |
| XnSkeletonJoint const & | eJoint1, | ||
| XnSkeletonJoint const & | eJoint2, | ||
| XnSkeletonJoint const & | eJoint3, | ||
| XnSkeletonJoint const & | eJoint4 | ||
| ) |
Definition at line 369 of file teleop_nao_ni.cpp.
| XnPoint3D getBodyLoc | ( | XnUserID const & | user, |
| XnSkeletonJoint const & | eJoint1 | ||
| ) |
Definition at line 342 of file teleop_nao_ni.cpp.
| float getLimbAngle | ( | XnUserID const & | user, |
| XnSkeletonJoint const & | eJoint1, | ||
| XnSkeletonJoint const & | eJoint2, | ||
| XnSkeletonJoint const & | eJoint3 | ||
| ) |
Definition at line 444 of file teleop_nao_ni.cpp.
| float getTorsoRotation | ( | XnUserID const & | user, |
| XnSkeletonJoint const & | eJoint1, | ||
| XnSkeletonJoint const & | eJoint2 | ||
| ) |
Definition at line 523 of file teleop_nao_ni.cpp.
Definition at line 880 of file teleop_nao_ni.cpp.
| void stopWalking | ( | TeleopNaoNi & | robot | ) |
Definition at line 294 of file teleop_nao_ni.cpp.
| void XN_CALLBACK_TYPE User_LostUser | ( | xn::UserGenerator & | generator, |
| XnUserID | nId, | ||
| void * | pCookie | ||
| ) |
Definition at line 308 of file teleop_nao_ni.cpp.
| void XN_CALLBACK_TYPE User_NewUser | ( | xn::UserGenerator & | generator, |
| XnUserID | nId, | ||
| void * | pCookie | ||
| ) |
Definition at line 299 of file teleop_nao_ni.cpp.
| void XN_CALLBACK_TYPE UserCalibration_CalibrationEnd | ( | xn::SkeletonCapability & | capability, |
| XnUserID | nId, | ||
| XnBool | bSuccess, | ||
| void * | pCookie | ||
| ) |
Definition at line 318 of file teleop_nao_ni.cpp.
| void XN_CALLBACK_TYPE UserCalibration_CalibrationStart | ( | xn::SkeletonCapability & | capability, |
| XnUserID | nId, | ||
| void * | pCookie | ||
| ) |
Definition at line 313 of file teleop_nao_ni.cpp.
| void XN_CALLBACK_TYPE UserPose_PoseDetected | ( | xn::PoseDetectionCapability & | capability, |
| XnChar const * | strPose, | ||
| XnUserID | nId, | ||
| void * | pCookie | ||
| ) |
Definition at line 334 of file teleop_nao_ni.cpp.
Variable Documentation
| float anterior_control_line = 0.0 |
Definition at line 145 of file teleop_nao_ni.cpp.
| float anterior_safe_line = 0.0 |
Definition at line 139 of file teleop_nao_ni.cpp.
| float control_angle = 0.0 |
Definition at line 149 of file teleop_nao_ni.cpp.
| XnBool g_bNeedPose = FALSE |
Definition at line 105 of file teleop_nao_ni.cpp.
Definition at line 101 of file teleop_nao_ni.cpp.
Definition at line 102 of file teleop_nao_ni.cpp.
Definition at line 106 of file teleop_nao_ni.cpp.
Definition at line 103 of file teleop_nao_ni.cpp.
Definition at line 110 of file teleop_nao_ni.cpp.
Definition at line 152 of file teleop_nao_ni.cpp.
Definition at line 151 of file teleop_nao_ni.cpp.
| float left_control_line = 0.0 |
Definition at line 148 of file teleop_nao_ni.cpp.
| float left_safe_line = 0.0 |
Definition at line 142 of file teleop_nao_ni.cpp.
| std_msgs::String naosay |
Definition at line 109 of file teleop_nao_ni.cpp.
| float posterior_control_line = 0.0 |
Definition at line 146 of file teleop_nao_ni.cpp.
| float posterior_safe_line = 0.0 |
Definition at line 140 of file teleop_nao_ni.cpp.
| float right_control_line = 0.0 |
Definition at line 147 of file teleop_nao_ni.cpp.
| float right_safe_line = 0.0 |
Definition at line 141 of file teleop_nao_ni.cpp.
| float safe_angle = 0.0 |
Definition at line 143 of file teleop_nao_ni.cpp.