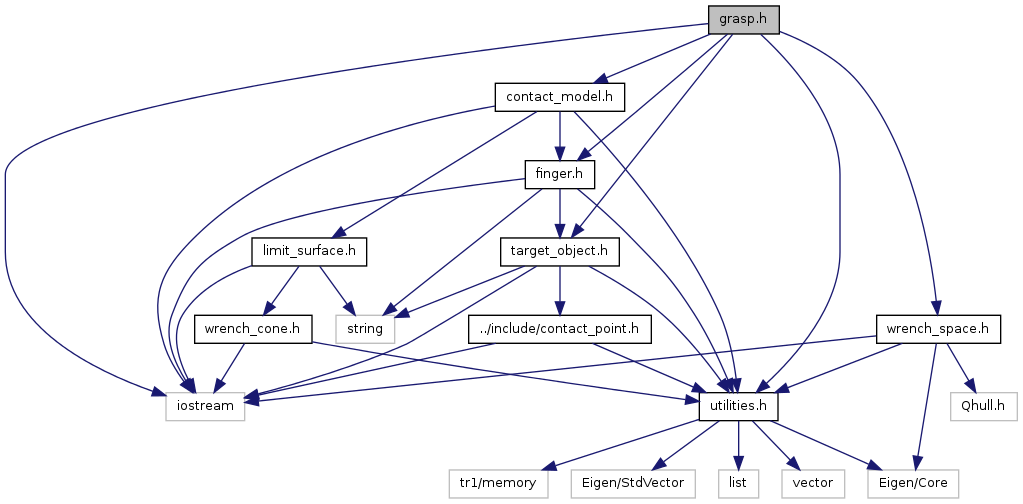
#include "target_object.h"#include "utilities.h"#include "contact_model.h"#include "finger.h"#include "wrench_space.h"#include <iostream>
Include dependency graph for grasp.h:
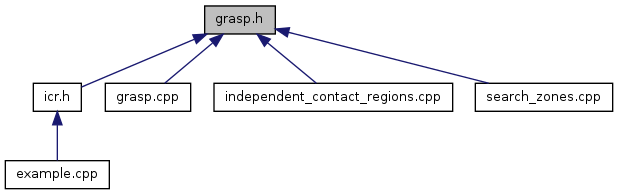
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | ICR::Grasp |
| The central class of the icrcpp library; Holds a list of ICR::Finger and a ICR::DiscreteWrenchSpace describing the Grasp Wrench Space. More... | |
Namespaces | |
| namespace | ICR |