Base class for sparse feature extractors. More...
#include <feature_detector.h>
Public Member Functions | |
| FeatureDetector () | |
| Default constructor. | |
| FeatureDetector () | |
| Default constructor. | |
| void | findFeatures (RGBDFrame &frame) |
| Main function to call to detect the sparse features in an RGBDFrame and fill out the corresponding information. | |
| void | findFeatures (RGBDFrame &frame) |
| Main function to call to detect the sparse features in an RGBDFrame and fill out the corresponding information. | |
| double | getMaxRange () const |
| Returns the maximum allowed z-depth (in meters) for features. | |
| double | getMaxRange () const |
| Returns the maximum allowed z-depth (in meters) for features. | |
| double | getMaxStDev () const |
| Returns the maximum allowed std_dev(z) (in meters) for features. | |
| double | getMaxStDev () const |
| Returns the maximum allowed std_dev(z) (in meters) for features. | |
| int | getSmooth () const |
| Returns the smoothing size. | |
| int | getSmooth () const |
| Returns the smoothing size. | |
| void | setComputeDescriptors (bool compute_descriptors) |
| void | setComputeDescriptors (bool compute_descriptors) |
| void | setMaxRange (double max_range) |
| Sets the maximum allowed z-depth (in meters) for features. | |
| void | setMaxRange (double max_range) |
| Sets the maximum allowed z-depth (in meters) for features. | |
| void | setMaxStDev (double max_stdev) |
| Sets the maximum allowed std_dev(z) (in meters) for features. | |
| void | setMaxStDev (double max_stdev) |
| Sets the maximum allowed std_dev(z) (in meters) for features. | |
| void | setSmooth (int smooth) |
| Sets the smoothing size. | |
| void | setSmooth (int smooth) |
| Sets the smoothing size. | |
| virtual | ~FeatureDetector () |
| Default destructor. | |
| virtual | ~FeatureDetector () |
| Default destructor. | |
Protected Member Functions | |
| virtual void | findFeatures (RGBDFrame &frame, const cv::Mat &input_img)=0 |
| Implementation of the feature detector. | |
| virtual void | findFeatures (RGBDFrame &frame, const cv::Mat &input_img)=0 |
| Implementation of the feature detector. | |
Protected Attributes | |
| bool | compute_descriptors_ |
| whether to calculate feature descriptors | |
| boost::mutex | mutex_ |
| state mutex | |
Private Attributes | |
| double | max_range_ |
| maximum allowed z-depth (in meters) for features | |
| double | max_stdev_ |
| maximum allowed std_dev(z) (in meters) for features | |
| int | smooth_ |
| blurring size (blur winddow = smooth*2 + 1) | |
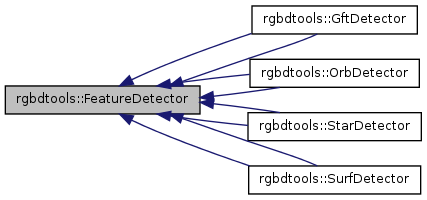
Base class for sparse feature extractors.
Definition at line 37 of file include/rgbdtools/features/feature_detector.h.
Default constructor.
Definition at line 28 of file feature_detector.cpp.
| rgbdtools::FeatureDetector::~FeatureDetector | ( | ) | [virtual] |
Default destructor.
Definition at line 37 of file feature_detector.cpp.
Default constructor.
| virtual rgbdtools::FeatureDetector::~FeatureDetector | ( | ) | [virtual] |
Default destructor.
| void rgbdtools::FeatureDetector::findFeatures | ( | RGBDFrame & | frame | ) |
Main function to call to detect the sparse features in an RGBDFrame and fill out the corresponding information.
| frame | the input frame |
todo: maybe check type of keypoints (ORB/GFT etc), and if matches, don't clear it
Definition at line 42 of file feature_detector.cpp.
| void rgbdtools::FeatureDetector::findFeatures | ( | RGBDFrame & | frame | ) |
Main function to call to detect the sparse features in an RGBDFrame and fill out the corresponding information.
| frame | the input frame |
| virtual void rgbdtools::FeatureDetector::findFeatures | ( | RGBDFrame & | frame, |
| const cv::Mat & | input_img | ||
| ) | [protected, pure virtual] |
Implementation of the feature detector.
| frame | the input frame |
| input_img | the image for feature detection, derived from the RGB image of the frame after (optional) blurring |
Implemented in rgbdtools::GftDetector, rgbdtools::OrbDetector, rgbdtools::StarDetector, rgbdtools::SurfDetector, rgbdtools::GftDetector, rgbdtools::OrbDetector, rgbdtools::StarDetector, and rgbdtools::SurfDetector.
| virtual void rgbdtools::FeatureDetector::findFeatures | ( | RGBDFrame & | frame, |
| const cv::Mat & | input_img | ||
| ) | [protected, pure virtual] |
Implementation of the feature detector.
| frame | the input frame |
| input_img | the image for feature detection, derived from the RGB image of the frame after (optional) blurring |
Implemented in rgbdtools::GftDetector, rgbdtools::OrbDetector, rgbdtools::StarDetector, rgbdtools::SurfDetector, rgbdtools::GftDetector, rgbdtools::OrbDetector, rgbdtools::StarDetector, and rgbdtools::SurfDetector.
| double rgbdtools::FeatureDetector::getMaxRange | ( | ) | const [inline] |
Returns the maximum allowed z-depth (in meters) for features.
Definition at line 104 of file feature_detector.cpp.
| double rgbdtools::FeatureDetector::getMaxRange | ( | ) | const [inline] |
Returns the maximum allowed z-depth (in meters) for features.
| double rgbdtools::FeatureDetector::getMaxStDev | ( | ) | const [inline] |
Returns the maximum allowed std_dev(z) (in meters) for features.
Definition at line 109 of file feature_detector.cpp.
| double rgbdtools::FeatureDetector::getMaxStDev | ( | ) | const [inline] |
Returns the maximum allowed std_dev(z) (in meters) for features.
| int rgbdtools::FeatureDetector::getSmooth | ( | ) | const [inline] |
Returns the smoothing size.
Smoothing is performed using Gaussian bluring in a window of size smooth*2 + 1
If smooth is set to 0, then no blurring will take place
Definition at line 99 of file feature_detector.cpp.
| int rgbdtools::FeatureDetector::getSmooth | ( | ) | const [inline] |
Returns the smoothing size.
Smoothing is performed using Gaussian bluring in a window of size smooth*2 + 1
If smooth is set to 0, then no blurring will take place
| void rgbdtools::FeatureDetector::setComputeDescriptors | ( | bool | compute_descriptors | ) |
Definition at line 79 of file feature_detector.cpp.
| void rgbdtools::FeatureDetector::setComputeDescriptors | ( | bool | compute_descriptors | ) |
| void rgbdtools::FeatureDetector::setMaxRange | ( | double | max_range | ) |
Sets the maximum allowed z-depth (in meters) for features.
| max_range | maximum allowed z-depth (in meters) for features |
| void rgbdtools::FeatureDetector::setMaxRange | ( | double | max_range | ) |
Sets the maximum allowed z-depth (in meters) for features.
| max_range | maximum allowed z-depth (in meters) for features |
Definition at line 89 of file feature_detector.cpp.
| void rgbdtools::FeatureDetector::setMaxStDev | ( | double | max_stdev | ) |
Sets the maximum allowed std_dev(z) (in meters) for features.
| max_stdev | maximum allowed std_dev(z) (in meters) for features |
| void rgbdtools::FeatureDetector::setMaxStDev | ( | double | max_stdev | ) |
Sets the maximum allowed std_dev(z) (in meters) for features.
| max_stdev | maximum allowed std_dev(z) (in meters) for features |
Definition at line 94 of file feature_detector.cpp.
| void rgbdtools::FeatureDetector::setSmooth | ( | int | smooth | ) |
Sets the smoothing size.
Smoothing is performed using Gaussian bluring in a window of size smooth*2 + 1
If smooth is set to 0, then no blurring will take place
| smooth | smoothing window size |
| void rgbdtools::FeatureDetector::setSmooth | ( | int | smooth | ) |
Sets the smoothing size.
Smoothing is performed using Gaussian bluring in a window of size smooth*2 + 1
If smooth is set to 0, then no blurring will take place
| smooth | smoothing window size |
Definition at line 84 of file feature_detector.cpp.
bool rgbdtools::FeatureDetector::compute_descriptors_ [protected] |
whether to calculate feature descriptors
Definition at line 103 of file include/rgbdtools/features/feature_detector.h.
double rgbdtools::FeatureDetector::max_range_ [private] |
maximum allowed z-depth (in meters) for features
Definition at line 115 of file include/rgbdtools/features/feature_detector.h.
double rgbdtools::FeatureDetector::max_stdev_ [private] |
maximum allowed std_dev(z) (in meters) for features
Definition at line 116 of file include/rgbdtools/features/feature_detector.h.
boost::mutex rgbdtools::FeatureDetector::mutex_ [protected] |
state mutex
Definition at line 101 of file include/rgbdtools/features/feature_detector.h.
int rgbdtools::FeatureDetector::smooth_ [private] |
blurring size (blur winddow = smooth*2 + 1)
Definition at line 114 of file include/rgbdtools/features/feature_detector.h.

