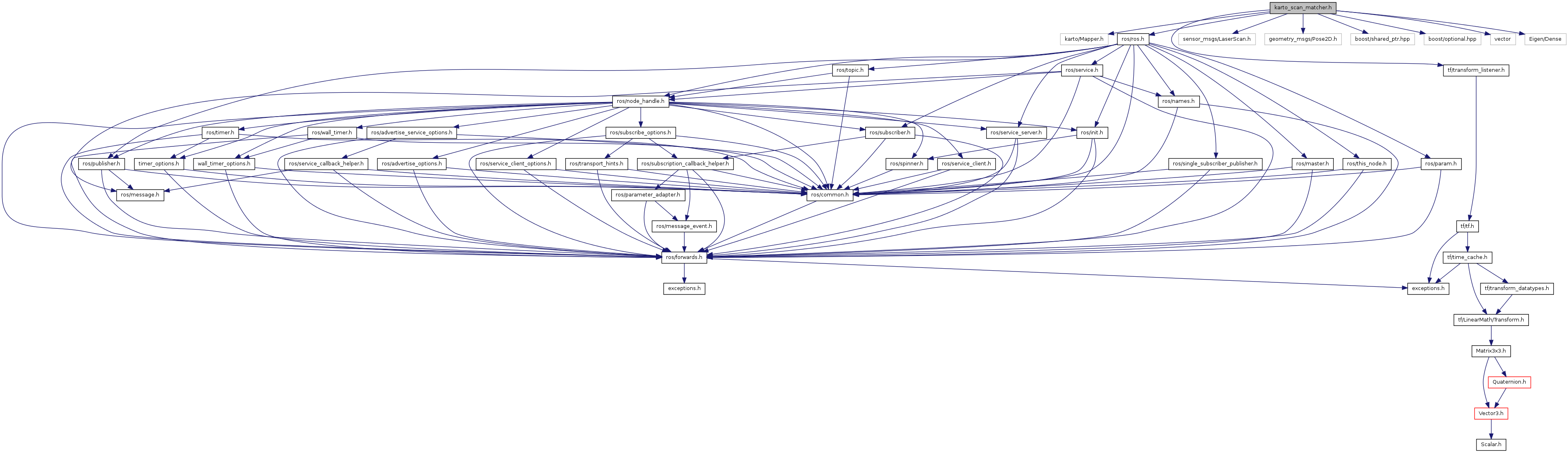
#include <karto/Mapper.h>#include <ros/ros.h>#include <tf/transform_listener.h>#include <sensor_msgs/LaserScan.h>#include <geometry_msgs/Pose2D.h>#include <boost/shared_ptr.hpp>#include <boost/optional.hpp>#include <vector>#include <Eigen/Dense>
Include dependency graph for karto_scan_matcher.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | karto_scan_matcher::KartoScanMatcher |
| Wraps the Karto Scan matcher. More... | |
| struct | karto_scan_matcher::ScanMatchResult |
| Result of scan matching. More... | |
| struct | karto_scan_matcher::ScanWithPose |
| Represents a 2d scan at some pose. More... | |
Namespaces | |
| namespace | karto_scan_matcher |
Typedefs | |
| typedef std::vector< double > | karto_scan_matcher::DoubleVector |
Variables | |
| const double | karto_scan_matcher::DEFAULT_RANGE_THRESHOLD = 12.0 |
| const double | karto_scan_matcher::DEFAULT_SMEAR_DEVIATION = 0.03 |
| Some parameters of the scan matching. | |