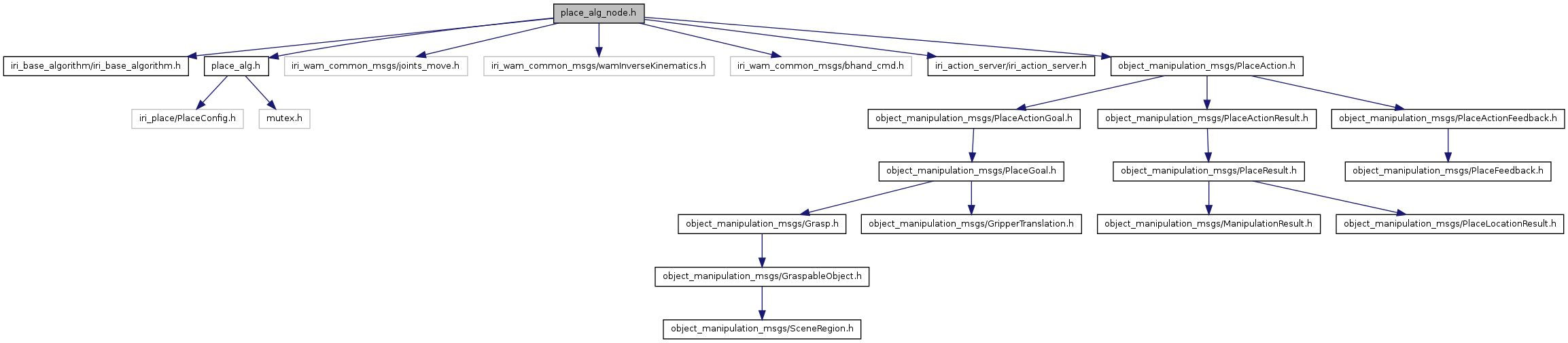
#include <iri_base_algorithm/iri_base_algorithm.h>#include "place_alg.h"#include <iri_wam_common_msgs/joints_move.h>#include <iri_wam_common_msgs/wamInverseKinematics.h>#include <iri_wam_common_msgs/bhand_cmd.h>#include <iri_action_server/iri_action_server.h>#include <object_manipulation_msgs/PlaceAction.h>
Include dependency graph for place_alg_node.h:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | PlaceAlgNode |
| IRI ROS Specific Algorithm Class. More... | |
Enumerations | |
| enum | ACTIONSTATUS { IDLE, POSE_CHECKED, POSITION_REACHED, HAND_OPENED, FINISH } |
Enumeration Type Documentation
| enum ACTIONSTATUS |
Definition at line 42 of file place_alg_node.h.