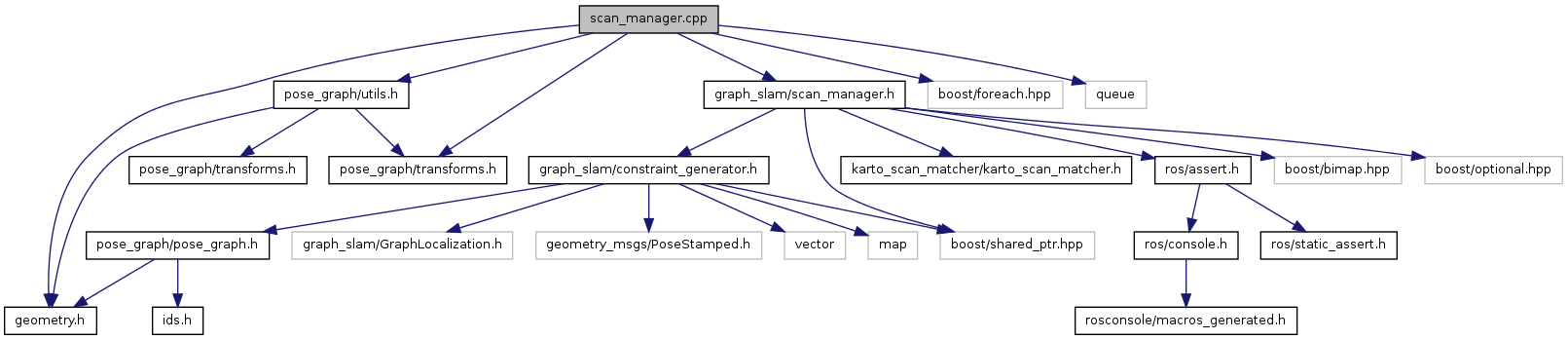
#include <graph_slam/scan_manager.h>#include <pose_graph/geometry.h>#include <pose_graph/utils.h>#include <pose_graph/transforms.h>#include <boost/foreach.hpp>#include <queue>
Include dependency graph for scan_manager.cpp:
Go to the source code of this file.
Namespaces | |
| namespace | graph_slam |
Typedefs | |
| typedef NodeSequenceMap::left_map::const_iterator | graph_slam::LeftIter |
| typedef NodeSequenceMap::right_map::const_iterator | graph_slam::RightIter |
| typedef NodeSequenceMap::value_type | graph_slam::SequenceLink |
Functions | |
| void | graph_slam::addChain (const Chain &chain, vector< Chain > *chains, NodeSet *processed) |
| bool | graph_slam::closerTo (const gm::Pose2D &pose, const NodePoseMap &optimized_poses, const NodeId n1, const NodeId n2) |
| pg::PrecisionMatrix | graph_slam::getPrecisionMatrix (const karto_scan_matcher::ScanMatchResult &res, const bool use_covariances) |
| Utility functions for subclasses. | |
| ksm::ScanWithPose | graph_slam::makeScanWithPose (const NodePoseMap &optimized_poses, const NodeScanMap scans_, const NodeId n) |
Variables | |
| const double | graph_slam::RADIAN_TO_METER_MULT = 1.0 |
Detailed Description
Implementation of ScanManager class
Definition in file scan_manager.cpp.