#include <ros/ros.h>#include <nodelet/nodelet.h>#include <pluginlib/class_list_macros.h>#include <diagnostic_updater/diagnostic_updater.h>#include "starmac_msgs/OperatorCommands.h"#include "flyer_controller/control_mode_status.h"#include "flyer_controller/control_mode_output.h"#include "flyer_controller/control_mode_cmd.h"#include "flyer_controller/control_utils.h"#include <nav_msgs/Odometry.h>#include <angles/angles.h>#include <tf/tf.h>#include <algorithm>
Include dependency graph for control_mode.h:

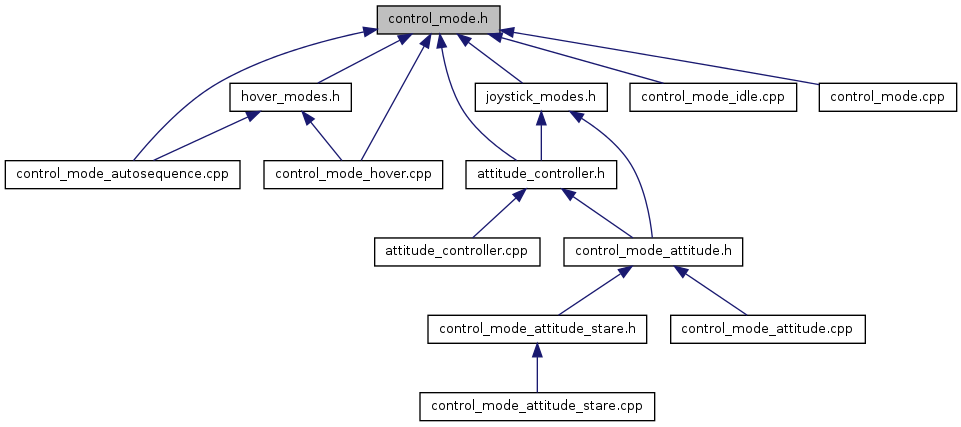
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | flyer_controller::ControlMode |
Namespaces | |
| namespace | flyer_controller |
| namespace | flyer_controller::ControlModeTypes |
Defines | |
| #define | CHECK_PARAMETER(x, msg) {if(!(x)) {ROS_FATAL_STREAM(msg); ros::requestShutdown(); return;}} |
Typedefs | |
| typedef ControlModeStates | flyer_controller::ControlModeTypes::ControlModeState |
Enumerations | |
| enum | flyer_controller::ControlModeTypes::ControlModeStates { flyer_controller::ControlModeTypes::ERROR = 0, flyer_controller::ControlModeTypes::OFF = 1, flyer_controller::ControlModeTypes::IDLE = 2, flyer_controller::ControlModeTypes::STANDBY = 3, flyer_controller::ControlModeTypes::ACTIVE = 4 } |
Define Documentation
| #define CHECK_PARAMETER | ( | x, | |
| msg | |||
| ) | {if(!(x)) {ROS_FATAL_STREAM(msg); ros::requestShutdown(); return;}} |
Definition at line 53 of file control_mode.h.