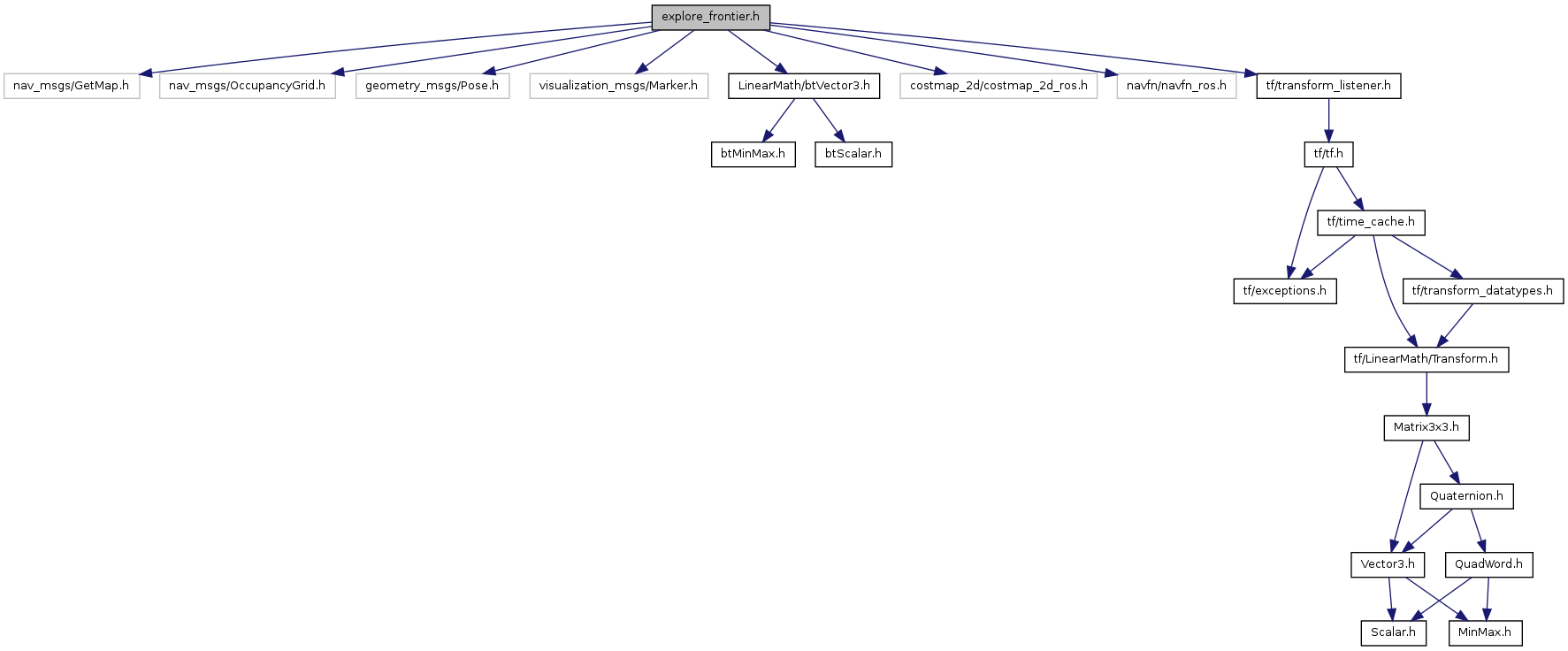
#include <nav_msgs/GetMap.h>#include <nav_msgs/OccupancyGrid.h>#include <geometry_msgs/Pose.h>#include <visualization_msgs/Marker.h>#include <LinearMath/btVector3.h>#include <costmap_2d/costmap_2d_ros.h>#include <navfn/navfn_ros.h>#include <tf/transform_listener.h>
Include dependency graph for explore_frontier.h:
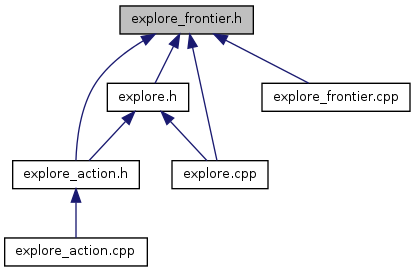
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | explore::ExploreFrontier |
| A class that will identify frontiers in a partially explored map. More... | |
| struct | explore::Frontier |
| struct | explore::FrontierPoint |
| struct | explore::WeightedFrontier |
Namespaces | |
| namespace | explore |