#include <coverage_3d_tools/conversions.h>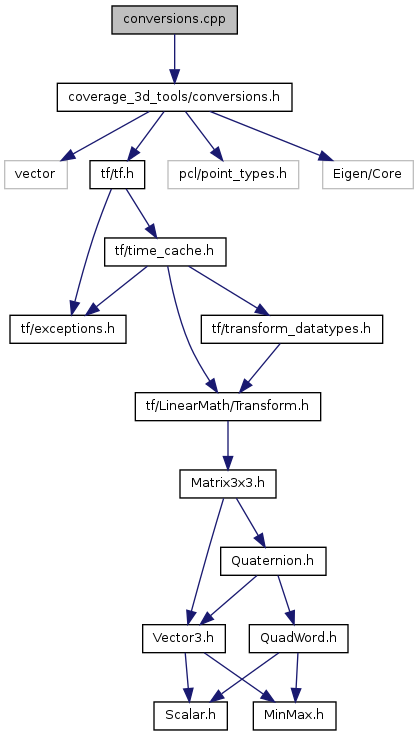
Go to the source code of this file.
Functions | |
| Eigen::Vector3f | PoseTF2EigenVector3 (tf::Pose pose) |
| Eigen::VectorXf | StdVector2Eigen (const std::vector< double > &v) |
| pcl::PointXYZ | VectorEigen2PointXYZ (Eigen::Vector3f v) |
| std::vector< double > | VectorEigen2Std (const Eigen::VectorXf &v) |
| Eigen::Vector3f PoseTF2EigenVector3 | ( | tf::Pose | pose | ) |
Definition at line 37 of file conversions.cpp.
| Eigen::VectorXf StdVector2Eigen | ( | const std::vector< double > & | v | ) |
Definition at line 11 of file conversions.cpp.
| pcl::PointXYZ VectorEigen2PointXYZ | ( | Eigen::Vector3f | v | ) |
Definition at line 29 of file conversions.cpp.
| std::vector<double> VectorEigen2Std | ( | const Eigen::VectorXf & | v | ) |
Definition at line 20 of file conversions.cpp.

