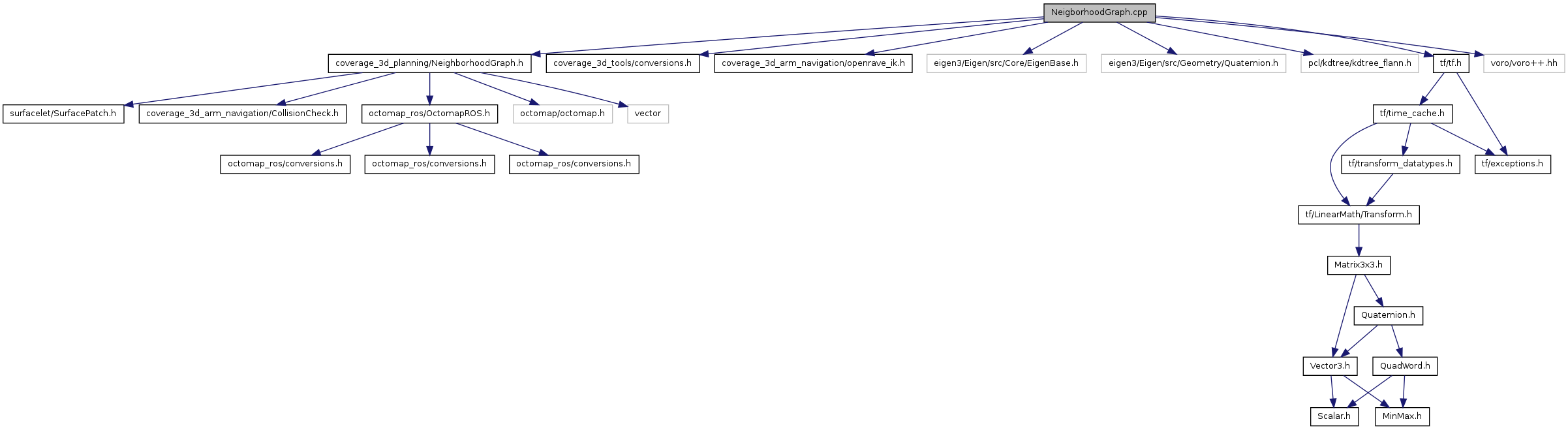
#include <coverage_3d_planning/NeighborhoodGraph.h>#include <coverage_3d_tools/conversions.h>#include <coverage_3d_arm_navigation/openrave_ik.h>#include <eigen3/Eigen/src/Core/EigenBase.h>#include <eigen3/Eigen/src/Geometry/Quaternion.h>#include <pcl/kdtree/kdtree_flann.h>#include <tf/tf.h>#include <voro/voro++.hh>