#include "plan.h"#include "symbolicState.h"#include <deque>#include <string>#include <sstream>#include <iostream>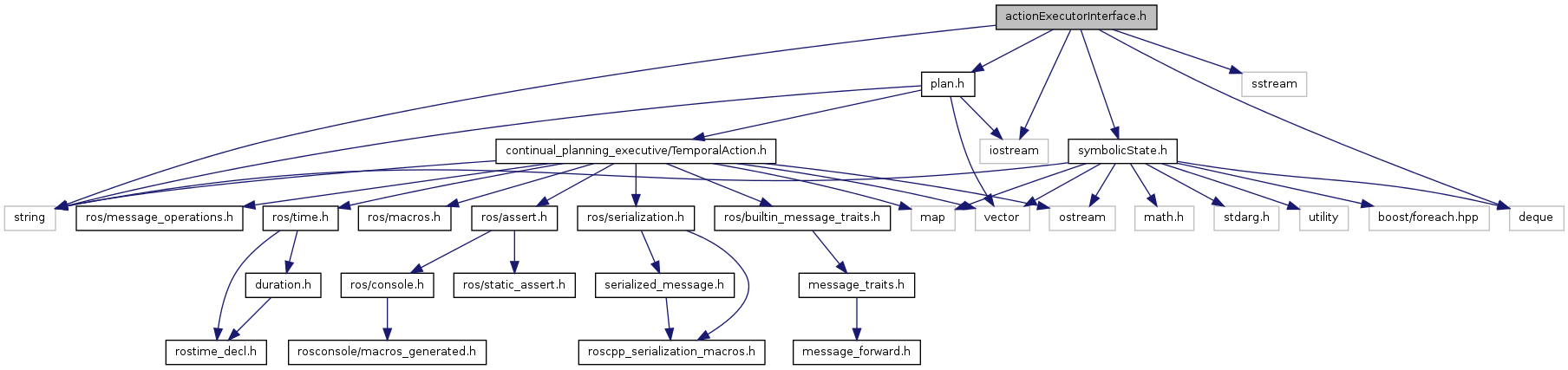
Go to the source code of this file.
Classes | |
| class | continual_planning_executive::ActionExecutorInterface |
| An object that can execute DurativeActions from a plan. More... | |
Namespaces | |
| namespace | continual_planning_executive |
Functions | |
| bool | continual_planning_executive::splitNamedId (const string &namedId, string &name, int &id) |
| Split a named id (e.g. robot0) in name and id (robot, 0). | |

