#include "btCollisionShape.h"#include "LinearMath/btVector3.h"#include "LinearMath/btTransform.h"#include "LinearMath/btMatrix3x3.h"#include "btCollisionMargin.h"#include "LinearMath/btAlignedAllocator.h"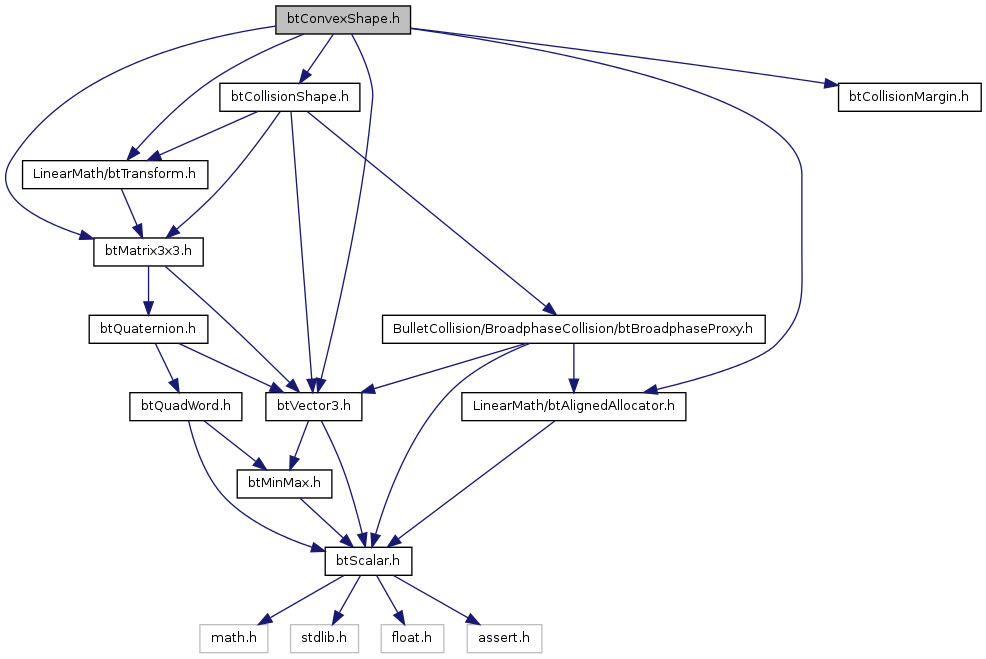
Go to the source code of this file.
Defines | |
| #define | MAX_PREFERRED_PENETRATION_DIRECTIONS 10 |
Functions | |
| ATTRIBUTE_ALIGNED16 (class) btConvexShape | |
| #define MAX_PREFERRED_PENETRATION_DIRECTIONS 10 |
Definition at line 27 of file btConvexShape.h.
| ATTRIBUTE_ALIGNED16 | ( | class | ) |
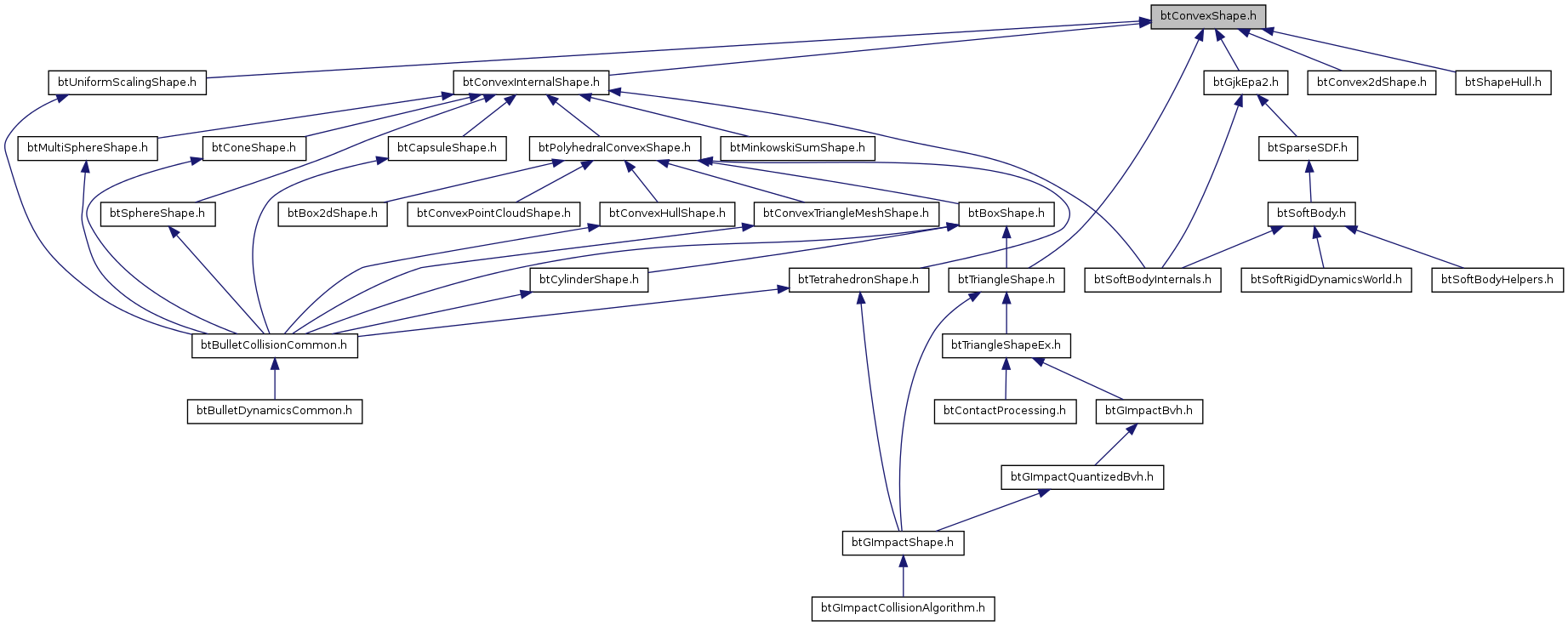
The btConvexShape is an abstract shape interface, implemented by all convex shapes such as btBoxShape, btConvexHullShape etc. It describes general convex shapes using the localGetSupportingVertex interface, used by collision detectors such as btGjkPairDetector.
getAabb's default implementation is brute force, expected derived classes to implement a fast dedicated version
Definition at line 31 of file btConvexShape.h.

