ROS driver for the ART throttle servo controller. More...
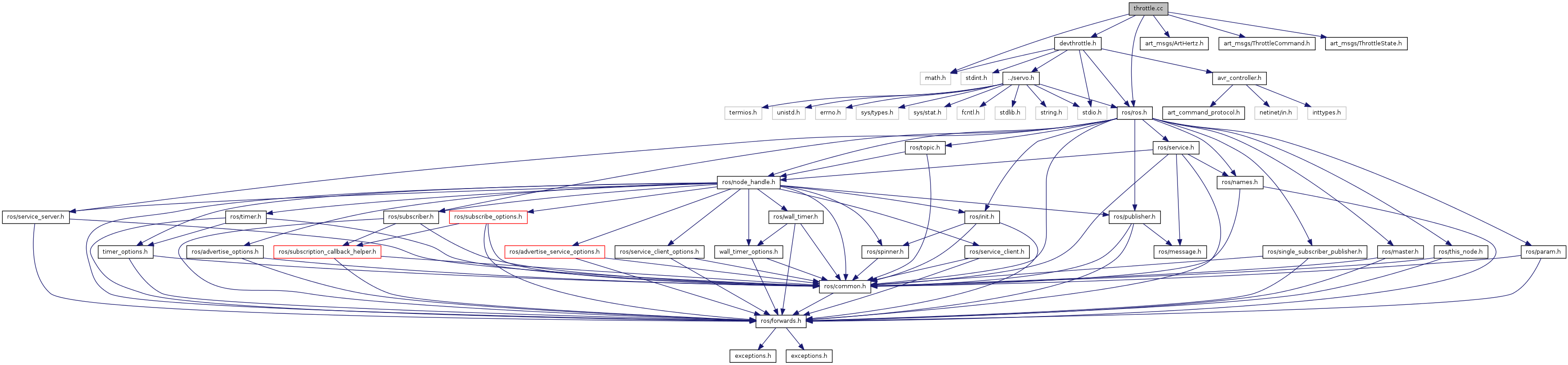
#include <math.h>#include <ros/ros.h>#include <art_msgs/ArtHertz.h>#include <art_msgs/ThrottleCommand.h>#include <art_msgs/ThrottleState.h>#include "devthrottle.h"
Include dependency graph for throttle.cc:
Go to the source code of this file.
Classes | |
| class | Throttle |
Defines | |
| #define | CLASS "Throttle" |
| #define | IOADR_MAX_INPUTS 8 |
Functions | |
| int | main (int argc, char **argv) |
Detailed Description
ROS driver for the ART throttle servo controller.
This driver provides an interface to the throttle servo for the ART robot vehicle.
Publishes
- throttle/state [art_msgs::ThrottleState] throttle status.
Subscribes
- throttle/cmd [art_msgs::ThrottleCommand] throttle commands.
Sets the desired throttle position. At position 1.0 the throttle is fully open, fully closed at 0.0 (idle). There are both absolute and relative requests.
Parameters
- port (string)
- tty port name for the throttle servo
- use "/dev/null" when simulating the device
- default: "/dev/throttle" (actual hardware port)
- training (bool)
- if true, log throttle data, but do not send it any commands
- default: false
Training mode collects data while a human driver operates the vehicle.
- diagnostic (bool)
- if true, log extra diagnostic throttle information not needed for normal operation
- default: false
Definition in file throttle.cc.
Define Documentation
| #define CLASS "Throttle" |
Definition at line 62 of file throttle.cc.
| #define IOADR_MAX_INPUTS 8 |
Definition at line 19 of file throttle.cc.
Function Documentation
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 214 of file throttle.cc.