ROS static transform broadcaster for the ART autonomous vehicle. More...
#include <ros/ros.h>#include <angles/angles.h>#include <tf/transform_broadcaster.h>#include <art/frames.h>#include <art_msgs/ArtHertz.h>#include <art_msgs/ArtVehicle.h>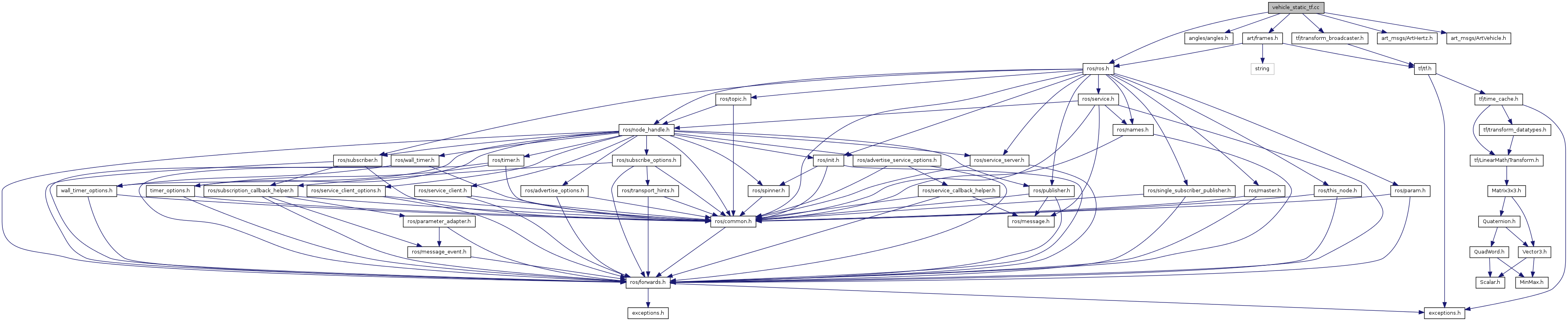
Go to the source code of this file.
Defines | |
| #define | NODE "vehicle_static_tf" |
Functions | |
| void | broadcastTF (tf::TransformBroadcaster *tf_broadcaster, std::string device_frame, double x, double y, double z, double roll, double pitch, double yaw) |
| int | main (int argc, char **argv) |
| void | opticalTF (tf::TransformBroadcaster *tf_broadcaster, std::string device_frame, double x, double y, double z, double roll, double pitch, double yaw) |
Detailed Description
ROS static transform broadcaster for the ART autonomous vehicle.
This node broadcasts static transforms from various devices to the "/vehicle" frame of reference. Some ROS components require that to be done about once every 10 seconds.
- Advertises
- /tf topic: broadcast transforms from /velodyne, /front_sick, and /rear_sick frames to /vehicle frame.
Definition in file vehicle_static_tf.cc.
Define Documentation
| #define NODE "vehicle_static_tf" |
Definition at line 34 of file vehicle_static_tf.cc.
Function Documentation
| void broadcastTF | ( | tf::TransformBroadcaster * | tf_broadcaster, |
| std::string | device_frame, | ||
| double | x, | ||
| double | y, | ||
| double | z, | ||
| double | roll, | ||
| double | pitch, | ||
| double | yaw | ||
| ) |
Publish the 3D pose of a device in the vehicle's frame of reference.
Definition at line 48 of file vehicle_static_tf.cc.
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
main program
Definition at line 98 of file vehicle_static_tf.cc.
| void opticalTF | ( | tf::TransformBroadcaster * | tf_broadcaster, |
| std::string | device_frame, | ||
| double | x, | ||
| double | y, | ||
| double | z, | ||
| double | roll, | ||
| double | pitch, | ||
| double | yaw | ||
| ) |
Publish the 3D pose of a device in the vehicle's frame of reference, plus its optical frame.
Definition at line 74 of file vehicle_static_tf.cc.