ART vehicle frames of reference for ROS transforms. More...
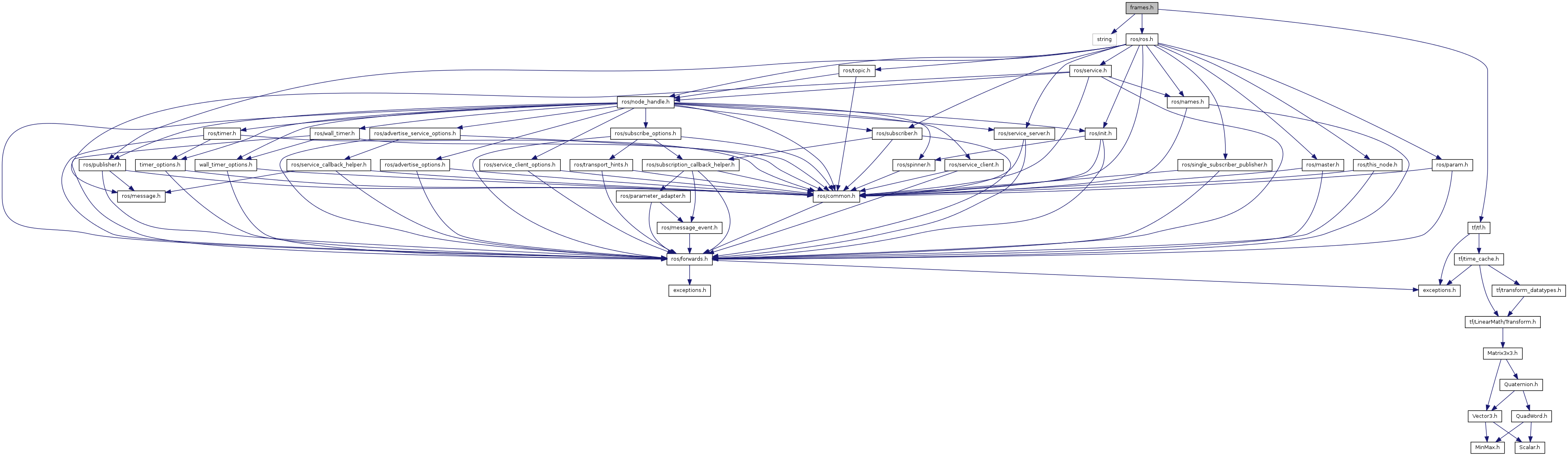
Include dependency graph for frames.h:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | ArtFrames::VehicleRelative |
Namespaces | |
| namespace | ArtFrames |
Variables | |
| const std::string | ArtFrames::center_front_camera = "center_front_camera" |
| const std::string | ArtFrames::center_front_camera_optical = "center_front_camera_optical" |
| const std::string | ArtFrames::earth = "earth" |
| const std::string | ArtFrames::front_sick = "front_sick" |
| const std::string | ArtFrames::left_front_camera = "left_front_camera" |
| const std::string | ArtFrames::left_front_camera_optical = "left_front_camera_optical" |
| const std::string | ArtFrames::odom = "odom" |
| const std::string | ArtFrames::rear_sick = "rear_sick" |
| const std::string | ArtFrames::right_front_camera = "right_front_camera" |
| const std::string | ArtFrames::right_front_camera_optical = "right_front_camera_optical" |
| const std::string | ArtFrames::vehicle = "vehicle" |
| const std::string | ArtFrames::velodyne = "velodyne" |