#include <rtcTransform.h>
Public Member Functions | |
| Vec3< T > | apply (const Vec3< T > &v) const |
| Vec3< T > & | apply (Vec3< T > &v) const |
| void | get (Rotation< T > &rot, Vec3< T > &trans) const |
| Rotation< T > | getRotation () const |
| Vec3< T > | getTranslation () const |
| Transform< T > | inverted () const |
| Transform< T > | relativeTo (const Transform< T > &referenceFrame) const |
| void | rotateX (T theta) |
| void | rotateY (T theta) |
| void | rotateZ (T theta) |
| void | set (const Rotation< T > &rot, const Vec3< T > &trans) |
| void | setRotation (const Rotation< T > &rot) |
| void | setTranslation (const Vec3< T > &trans) |
| Transform (const Rotation< T > &rot, const Vec3< T > &trans) | |
| Transform (const Vec3< T > &trans) | |
| Transform (const Rotation< T > &rot) | |
| Transform (const Mat< T, 4, 4 > &m) | |
| Transform () | |
| void | translate (const Vec3< T > &t) |
| void | translate (T x, T y, T z) |
| bool | verifyTag (std::string got, std::string expected) |
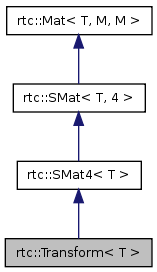
The Tranform Matrix Class
Defines transformation class for rigid body rotations and translations that knows how to construct itself from several other common rotation representations, such as quaternions, axis angles, and rotation matrices.
Definition at line 48 of file rtcTransform.h.
| rtc::Transform< T >::Transform | ( | ) | [inline] |
Ctor that initializes to no rotation and no translation.
Definition at line 106 of file rtcTransform.h.
| rtc::Transform< T >::Transform | ( | const Mat< T, 4, 4 > & | m | ) | [inline] |
Ctor that initializes from Mat<T,4,4>.
Definition at line 134 of file rtcTransform.h.
| rtc::Transform< T >::Transform | ( | const Rotation< T > & | r | ) | [inline] |
Ctor that initializes to the given rotation and no translation.
Definition at line 113 of file rtcTransform.h.
| rtc::Transform< T >::Transform | ( | const Vec3< T > & | t | ) | [inline] |
Ctor that initializes to no rotation and the given translation.
Definition at line 120 of file rtcTransform.h.
| rtc::Transform< T >::Transform | ( | const Rotation< T > & | rot, | |
| const Vec3< T > & | trans | |||
| ) | [inline] |
Ctor that starts with the given rotation and translation.
Definition at line 127 of file rtcTransform.h.
| Vec3< T > rtc::Transform< T >::apply | ( | const Vec3< T > & | v | ) | const [inline] |
Helper function that allows a transform to operate on a point.
Definition at line 272 of file rtcTransform.h.
| Vec3< T > & rtc::Transform< T >::apply | ( | Vec3< T > & | v | ) | const [inline] |
Helper function that allows a tranform to operate on a point. Helper function that allows a transform to operate on a point.
Definition at line 262 of file rtcTransform.h.
| void rtc::Transform< T >::get | ( | Rotation< T > & | r, | |
| Vec3< T > & | t | |||
| ) | const [inline] |
Get the rotation and translation
Definition at line 142 of file rtcTransform.h.
| Rotation< T > rtc::Transform< T >::getRotation | ( | ) | const [inline] |
Get the rotation and translation
Definition at line 160 of file rtcTransform.h.
| Vec3< T > rtc::Transform< T >::getTranslation | ( | ) | const [inline] |
Get the rotation and translation
Definition at line 152 of file rtcTransform.h.
| Transform< T > rtc::Transform< T >::inverted | ( | ) | const [inline] |
Fast inverse of a rigid tranform matrix. M = [ r t] [ 0 1]
inv(M) = [ r' -r'*t] [ 0 1]
Reimplemented from rtc::SMat< T, 4 >.
Definition at line 286 of file rtcTransform.h.
| Transform< T > rtc::Transform< T >::relativeTo | ( | const Transform< T > & | referenceFrame | ) | const [inline] |
Converts to a new coordinate frame
Definition at line 298 of file rtcTransform.h.
| void rtc::Transform< T >::rotateX | ( | T | theta | ) | [inline] |
Apply a rotation about the x axis to the transform
Definition at line 195 of file rtcTransform.h.
| void rtc::Transform< T >::rotateY | ( | T | theta | ) | [inline] |
Apply a rotation about the y axis to the transform
Definition at line 209 of file rtcTransform.h.
| void rtc::Transform< T >::rotateZ | ( | T | theta | ) | [inline] |
Apply a rotation about the z axis to the transform
Definition at line 223 of file rtcTransform.h.
| void rtc::Transform< T >::set | ( | const Rotation< T > & | r, | |
| const Vec3< T > & | t | |||
| ) | [inline] |
Set to the given rotation and translation
Definition at line 187 of file rtcTransform.h.
| void rtc::Transform< T >::setRotation | ( | const Rotation< T > & | r | ) | [inline] |
Set only the rotation portion of the Transform.
Definition at line 171 of file rtcTransform.h.
| void rtc::Transform< T >::setTranslation | ( | const Vec3< T > & | t | ) | [inline] |
Set only the translation portion of the Transform.
Definition at line 179 of file rtcTransform.h.
| void rtc::Transform< T >::translate | ( | const Vec3< T > & | t | ) | [inline] |
Apply a translation to the transform
Definition at line 247 of file rtcTransform.h.
| void rtc::Transform< T >::translate | ( | T | _x, | |
| T | _y, | |||
| T | _z | |||
| ) | [inline] |
Apply a translation to the transform
Definition at line 237 of file rtcTransform.h.
| bool rtc::Transform< T >::verifyTag | ( | std::string | got, | |
| std::string | expected | |||
| ) | [inline] |
Definition at line 303 of file rtcTransform.h.

