#include <string>#include <gtest/gtest.h>#include <ros/ros.h>#include <tf/transform_listener.h>#include <boost/thread/thread.hpp>#include <urdf/model.h>#include <kdl_parser/kdl_parser.hpp>#include "robot_state_publisher/joint_state_listener.h"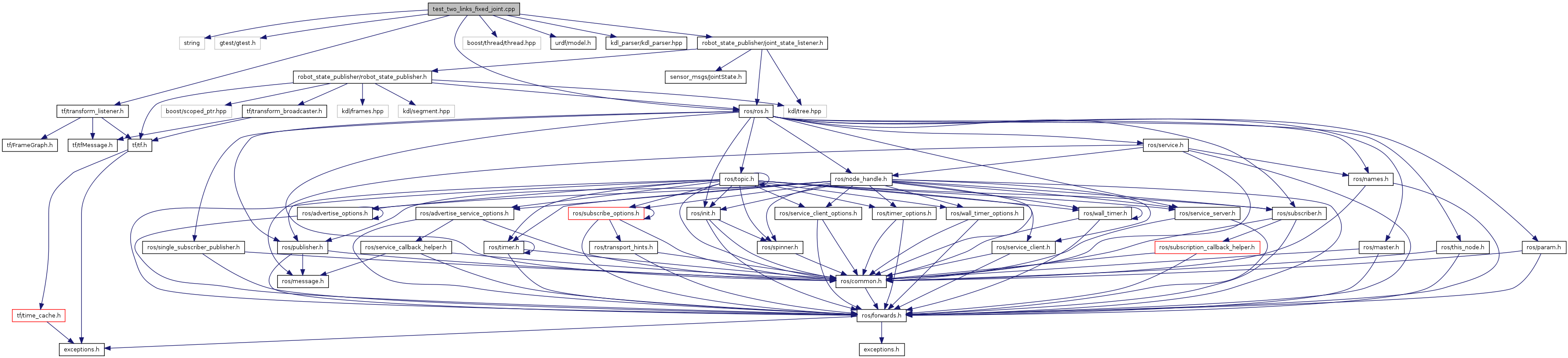
Go to the source code of this file.
Classes | |
| class | TestPublisher |
Defines | |
| #define | EPS 0.01 |
Functions | |
| int | main (int argc, char **argv) |
| TEST_F (TestPublisher, test) | |
Variables | |
| int | g_argc |
| char ** | g_argv |
| #define EPS 0.01 |
Definition at line 55 of file test_two_links_fixed_joint.cpp.
| int main | ( | int | argc, | |
| char ** | argv | |||
| ) |
Definition at line 100 of file test_two_links_fixed_joint.cpp.
| TEST_F | ( | TestPublisher | , | |
| test | ||||
| ) |
Definition at line 76 of file test_two_links_fixed_joint.cpp.
| int g_argc |
Definition at line 52 of file test_two_links_fixed_joint.cpp.
| char** g_argv |
Definition at line 53 of file test_two_links_fixed_joint.cpp.

