#include "frames.hpp"#include "rigidbodyinertia.hpp"#include "joint.hpp"#include <vector>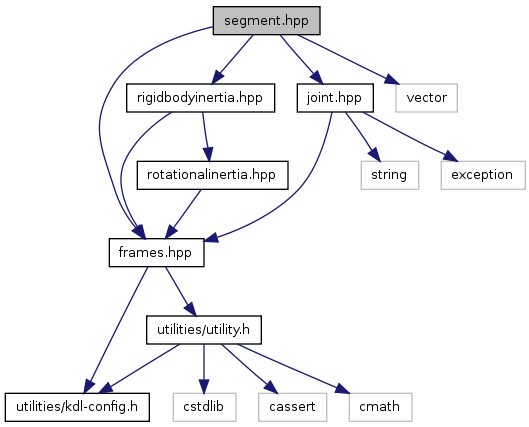

Go to the source code of this file.
Classes | |
| class | KDL::Segment |
| This class encapsulates a simple segment, that is a "rigid
body" (i.e., a frame and a rigid body inertia) with a joint and with "handles", root and tip to connect to other segments. More... | |
Namespaces | |
| namespace | KDL |

