#include "chainidsolver.hpp"#include "frames.hpp"#include "articulatedbodyinertia.hpp"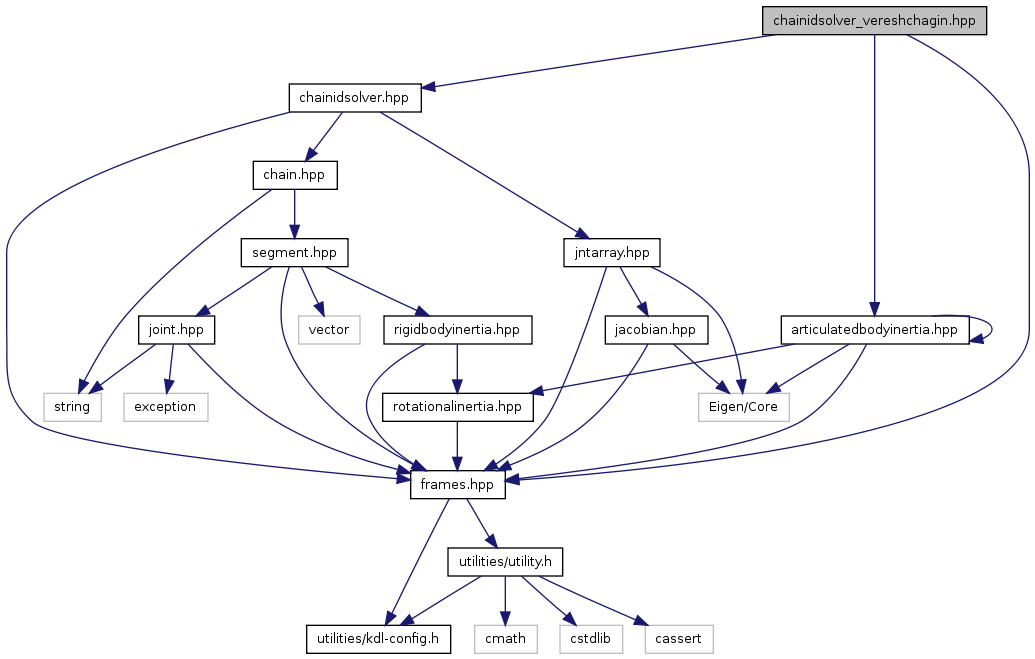
Go to the source code of this file.
Classes | |
| class | KDL::ChainIdSolver_Vereshchagin |
| struct | KDL::ChainIdSolver_Vereshchagin::segment_info |
Namespaces | |
| namespace | KDL |
Typedefs | |
| typedef std::vector< Frame > | KDL::Frames |
| typedef Eigen::Matrix< double, 6, 6 > | KDL::Matrix6d |
| typedef Eigen::Matrix< double, 6, Eigen::Dynamic > | KDL::Matrix6Xd |
| typedef std::vector< Twist > | KDL::Twists |
| Dynamics calculations by constraints based on Vereshchagin 1989. for a chain. This class creates instance of hybrid dynamics solver. The solver calculates total joint space accelerations in a chain when a constraint force(s) is applied to the chain's end-effector (task space/cartesian space). | |
| typedef Eigen::Matrix< double, 6, 1 > | KDL::Vector6d |

