#include <spatial_hashing.h>
Classes | |
| struct | CellIterator |
Public Types | |
| typedef BasicGrid< FLT >::Box3x | Box3x |
| typedef Point3< ScalarType > | CoordType |
| typedef HashType::iterator | HashIterator |
| typedef STDEXT::hash_multimap < Point3i, ObjType *, HashFunctor > | HashType |
| typedef ObjType * | ObjPtr |
| typedef ObjType::ScalarType | ScalarType |
| typedef SpatialHashTable | SpatialHashType |
Public Member Functions | |
| vcg::Box3i | Add (ObjType *s) |
| size_t | CellSize (const Point3i &cell) |
| void | Clear () |
| template<class OBJRAYISECTFUNCTOR , class OBJMARKER > | |
| ObjPtr | DoRay (OBJRAYISECTFUNCTOR &_rayIntersector, OBJMARKER &_marker, const Ray3< ScalarType > &_ray, const ScalarType &_maxDist, ScalarType &_t) |
| bool | EmptyCell (const Point3i &cell) const |
| template<class OBJPOINTDISTFUNCTOR , class OBJMARKER > | |
| ObjPtr | GetClosest (OBJPOINTDISTFUNCTOR &_getPointDistance, OBJMARKER &_marker, const CoordType &_p, const ScalarType &_maxDist, ScalarType &_minDist, CoordType &_closestPt) |
| template<class OBJMARKER , class OBJPTRCONTAINER > | |
| unsigned int | GetInBox (OBJMARKER &_marker, const Box3x _bbox, OBJPTRCONTAINER &_objectPtrs) |
| template<class OBJPOINTDISTFUNCTOR , class OBJMARKER , class OBJPTRCONTAINER , class DISTCONTAINER , class POINTCONTAINER > | |
| unsigned int | GetInSphere (OBJPOINTDISTFUNCTOR &_getPointDistance, OBJMARKER &_marker, const CoordType &_p, const ScalarType &_r, OBJPTRCONTAINER &_objectPtrs, DISTCONTAINER &_distances, POINTCONTAINER &_points) |
| template<class OBJPOINTDISTFUNCTOR , class OBJMARKER , class OBJPTRCONTAINER , class DISTCONTAINER , class POINTCONTAINER > | |
| unsigned int | GetKClosest (OBJPOINTDISTFUNCTOR &_getPointDistance, OBJMARKER &_marker, const unsigned int _k, const CoordType &_p, const ScalarType &_maxDist, OBJPTRCONTAINER &_objectPtrs, DISTCONTAINER &_distances, POINTCONTAINER &_points) |
| void | Grid (const Point3i &_c, CellIterator &first, CellIterator &end) |
| return the simplexes on a specified cell | |
| void | Grid (int x, int y, int z, CellIterator &first, CellIterator &last) |
| return the simplexes on a specified cell | |
| void | GridReal (const Point3< ScalarType > &p, CellIterator &first, CellIterator &last) |
| return the simplexes of the cell that contain p | |
| void | InitEmpty (const Box3x &_bbox, vcg::Point3i grid_size) |
| set an empty spatial hash table | |
| void | Remove (ObjType *s) |
| bool | RemoveCell (ObjType *s) |
| Remove all the objects contained in the cell containing s. | |
| int | RemoveInSphere (const Point3< ScalarType > &p, const ScalarType radius) |
| insert a new cell | |
| void | RemovePunctual (ObjType *s) |
| template<class OBJITER > | |
| void | Set (const OBJITER &_oBegin, const OBJITER &_oEnd, const Box3x &_bbox=Box3x()) |
| Insert a mesh in the grid. | |
| void | UpdateAllocatedCells () |
Public Attributes | |
| std::vector< Point3i > | AllocatedCells |
| HashType | hash_table |
Protected Member Functions | |
| void | InsertObject (ObjType *s, const Point3i &cell) |
| insert a new cell | |
| void | RemoveCell (const Point3i &cell) |
| remove all the objects in a cell | |
| bool | RemoveObject (ObjType *s, const Point3i &cell) |
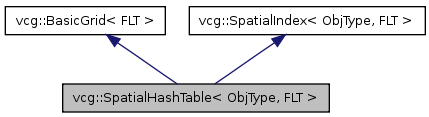
Spatial Hash Table Spatial Hashing as described in "Optimized Spatial Hashing for Coll ision Detection of Deformable Objects", Matthias Teschner and Bruno Heidelberger and Matthias Muller and Danat Pomeranets and Markus Gross
Definition at line 83 of file spatial_hashing.h.
| typedef BasicGrid<FLT>::Box3x vcg::SpatialHashTable< ObjType, FLT >::Box3x |
Reimplemented from vcg::BasicGrid< FLT >.
Reimplemented in vcg::DynamicSpatialHashTable< ContainerType, FLT >.
Definition at line 91 of file spatial_hashing.h.
| typedef Point3<ScalarType> vcg::SpatialHashTable< ObjType, FLT >::CoordType |
Reimplemented from vcg::SpatialIndex< ObjType, FLT >.
Reimplemented in vcg::DynamicSpatialHashTable< ContainerType, FLT >.
Definition at line 90 of file spatial_hashing.h.
| typedef HashType::iterator vcg::SpatialHashTable< ObjType, FLT >::HashIterator |
Definition at line 98 of file spatial_hashing.h.
| typedef STDEXT::hash_multimap<Point3i, ObjType *, HashFunctor> vcg::SpatialHashTable< ObjType, FLT >::HashType |
Definition at line 97 of file spatial_hashing.h.
| typedef ObjType* vcg::SpatialHashTable< ObjType, FLT >::ObjPtr |
Reimplemented from vcg::SpatialIndex< ObjType, FLT >.
Reimplemented in vcg::DynamicSpatialHashTable< ContainerType, FLT >.
Definition at line 88 of file spatial_hashing.h.
| typedef ObjType::ScalarType vcg::SpatialHashTable< ObjType, FLT >::ScalarType |
Reimplemented from vcg::SpatialIndex< ObjType, FLT >.
Definition at line 89 of file spatial_hashing.h.
| typedef SpatialHashTable vcg::SpatialHashTable< ObjType, FLT >::SpatialHashType |
Definition at line 87 of file spatial_hashing.h.
| vcg::Box3i vcg::SpatialHashTable< ObjType, FLT >::Add | ( | ObjType * | s | ) | [inline] |
Definition at line 172 of file spatial_hashing.h.
| size_t vcg::SpatialHashTable< ObjType, FLT >::CellSize | ( | const Point3i & | cell | ) | [inline] |
Definition at line 119 of file spatial_hashing.h.
| void vcg::SpatialHashTable< ObjType, FLT >::Clear | ( | void | ) | [inline] |
Definition at line 337 of file spatial_hashing.h.
| ObjPtr vcg::SpatialHashTable< ObjType, FLT >::DoRay | ( | OBJRAYISECTFUNCTOR & | _rayIntersector, | |
| OBJMARKER & | _marker, | |||
| const Ray3< ScalarType > & | _ray, | |||
| const ScalarType & | _maxDist, | |||
| ScalarType & | _t | |||
| ) | [inline] |
Definition at line 386 of file spatial_hashing.h.
| bool vcg::SpatialHashTable< ObjType, FLT >::EmptyCell | ( | const Point3i & | cell | ) | const [inline] |
Definition at line 124 of file spatial_hashing.h.
| ObjPtr vcg::SpatialHashTable< ObjType, FLT >::GetClosest | ( | OBJPOINTDISTFUNCTOR & | _getPointDistance, | |
| OBJMARKER & | _marker, | |||
| const CoordType & | _p, | |||
| const ScalarType & | _maxDist, | |||
| ScalarType & | _minDist, | |||
| CoordType & | _closestPt | |||
| ) | [inline] |
Definition at line 345 of file spatial_hashing.h.
| unsigned int vcg::SpatialHashTable< ObjType, FLT >::GetInBox | ( | OBJMARKER & | _marker, | |
| const Box3x | _bbox, | |||
| OBJPTRCONTAINER & | _objectPtrs | |||
| ) | [inline] |
Definition at line 377 of file spatial_hashing.h.
| unsigned int vcg::SpatialHashTable< ObjType, FLT >::GetInSphere | ( | OBJPOINTDISTFUNCTOR & | _getPointDistance, | |
| OBJMARKER & | _marker, | |||
| const CoordType & | _p, | |||
| const ScalarType & | _r, | |||
| OBJPTRCONTAINER & | _objectPtrs, | |||
| DISTCONTAINER & | _distances, | |||
| POINTCONTAINER & | _points | |||
| ) | [inline] |
Definition at line 363 of file spatial_hashing.h.
| unsigned int vcg::SpatialHashTable< ObjType, FLT >::GetKClosest | ( | OBJPOINTDISTFUNCTOR & | _getPointDistance, | |
| OBJMARKER & | _marker, | |||
| const unsigned int | _k, | |||
| const CoordType & | _p, | |||
| const ScalarType & | _maxDist, | |||
| OBJPTRCONTAINER & | _objectPtrs, | |||
| DISTCONTAINER & | _distances, | |||
| POINTCONTAINER & | _points | |||
| ) | [inline] |
Definition at line 353 of file spatial_hashing.h.
| void vcg::SpatialHashTable< ObjType, FLT >::Grid | ( | const Point3i & | _c, | |
| CellIterator & | first, | |||
| CellIterator & | end | |||
| ) | [inline] |
return the simplexes on a specified cell
Definition at line 330 of file spatial_hashing.h.
| void vcg::SpatialHashTable< ObjType, FLT >::Grid | ( | int | x, | |
| int | y, | |||
| int | z, | |||
| CellIterator & | first, | |||
| CellIterator & | last | |||
| ) | [inline] |
return the simplexes on a specified cell
Definition at line 324 of file spatial_hashing.h.
| void vcg::SpatialHashTable< ObjType, FLT >::GridReal | ( | const Point3< ScalarType > & | p, | |
| CellIterator & | first, | |||
| CellIterator & | last | |||
| ) | [inline] |
return the simplexes of the cell that contain p
Definition at line 316 of file spatial_hashing.h.
| void vcg::SpatialHashTable< ObjType, FLT >::InitEmpty | ( | const Box3x & | _bbox, | |
| vcg::Point3i | grid_size | |||
| ) | [inline] |
set an empty spatial hash table
Definition at line 259 of file spatial_hashing.h.
| void vcg::SpatialHashTable< ObjType, FLT >::InsertObject | ( | ObjType * | s, | |
| const Point3i & | cell | |||
| ) | [inline, protected] |
insert a new cell
Definition at line 142 of file spatial_hashing.h.
| void vcg::SpatialHashTable< ObjType, FLT >::Remove | ( | ObjType * | s | ) | [inline] |
Definition at line 245 of file spatial_hashing.h.
| bool vcg::SpatialHashTable< ObjType, FLT >::RemoveCell | ( | ObjType * | s | ) | [inline] |
Remove all the objects contained in the cell containing s.
Definition at line 189 of file spatial_hashing.h.
| void vcg::SpatialHashTable< ObjType, FLT >::RemoveCell | ( | const Point3i & | cell | ) | [inline, protected] |
remove all the objects in a cell
Definition at line 149 of file spatial_hashing.h.
| int vcg::SpatialHashTable< ObjType, FLT >::RemoveInSphere | ( | const Point3< ScalarType > & | p, | |
| const ScalarType | radius | |||
| ) | [inline] |
insert a new cell
Definition at line 198 of file spatial_hashing.h.
| bool vcg::SpatialHashTable< ObjType, FLT >::RemoveObject | ( | ObjType * | s, | |
| const Point3i & | cell | |||
| ) | [inline, protected] |
Definition at line 154 of file spatial_hashing.h.
| void vcg::SpatialHashTable< ObjType, FLT >::RemovePunctual | ( | ObjType * | s | ) | [inline] |
Definition at line 230 of file spatial_hashing.h.
| void vcg::SpatialHashTable< ObjType, FLT >::Set | ( | const OBJITER & | _oBegin, | |
| const OBJITER & | _oEnd, | |||
| const Box3x & | _bbox = Box3x() | |||
| ) | [inline] |
Insert a mesh in the grid.
inflate the bb calculated
Definition at line 281 of file spatial_hashing.h.
| void vcg::SpatialHashTable< ObjType, FLT >::UpdateAllocatedCells | ( | ) | [inline] |
Definition at line 129 of file spatial_hashing.h.
| std::vector<Point3i> vcg::SpatialHashTable< ObjType, FLT >::AllocatedCells |
Definition at line 103 of file spatial_hashing.h.
| HashType vcg::SpatialHashTable< ObjType, FLT >::hash_table |
Definition at line 99 of file spatial_hashing.h.

