#include <sensor_msgs/JointState.h>#include <cybergrasp/cybergraspforces.h>#include "sr_remappers/calibration_parser.h"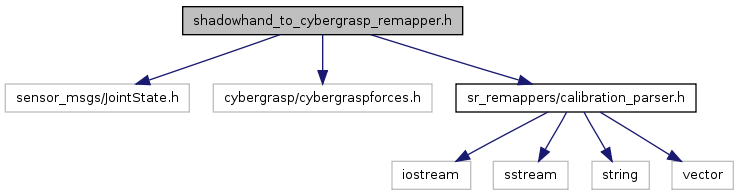

Go to the source code of this file.
Classes | |
| class | shadowhand_to_cybergrasp_remapper::ShadowhandToCybergraspRemapper |
| This program remaps the force information contained in /joint_states coming from the hand to the /cybergraspforces topic used to control the cybergrasp. More... | |
Namespaces | |
| namespace | shadowhand_to_cybergrasp_remapper |

