#include <grasp_retriever.h>
Public Member Functions | |
| ClusterRepGraspRetriever (ObjectsDatabasePtr database, const household_objects_database_msgs::DatabaseModelPose &model, const std::string &arm_name) | |
| virtual void | fetchFromDB () |
| virtual void | getGrasps (std::vector< GraspWithMetadata > &grasps) |
Private Attributes | |
| std::map< int, std::vector < household_objects_database::DatabaseGraspPtr > > | grasps_cache_ |
| A cache storing model_id->{cluster rep grasps for that model}. | |
Definition at line 127 of file grasp_retriever.h.
| probabilistic_grasp_planner::ClusterRepGraspRetriever::ClusterRepGraspRetriever | ( | ObjectsDatabasePtr | database, | |
| const household_objects_database_msgs::DatabaseModelPose & | model, | |||
| const std::string & | arm_name | |||
| ) |
Definition at line 230 of file grasp_retriever.cpp.
| void probabilistic_grasp_planner::ClusterRepGraspRetriever::fetchFromDB | ( | ) | [virtual] |
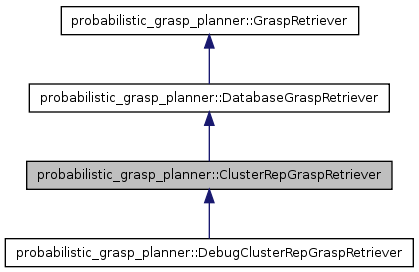
Reimplemented from probabilistic_grasp_planner::DatabaseGraspRetriever.
Definition at line 239 of file grasp_retriever.cpp.
| void probabilistic_grasp_planner::ClusterRepGraspRetriever::getGrasps | ( | std::vector< GraspWithMetadata > & | grasps | ) | [virtual] |
Given a list of models, retrieves all of the cluster representative grasps for those models and stores them with their metadata in the grasps vector.
Reimplemented from probabilistic_grasp_planner::DatabaseGraspRetriever.
Reimplemented in probabilistic_grasp_planner::DebugClusterRepGraspRetriever.
Definition at line 274 of file grasp_retriever.cpp.
std::map<int, std::vector<household_objects_database::DatabaseGraspPtr> > probabilistic_grasp_planner::ClusterRepGraspRetriever::grasps_cache_ [private] |
A cache storing model_id->{cluster rep grasps for that model}.
Reimplemented from probabilistic_grasp_planner::DatabaseGraspRetriever.
Definition at line 131 of file grasp_retriever.h.

