#include <kinematic_state_constraint_evaluator.h>
Public Member Functions | |
| virtual void | clear (void)=0 |
| Clear the stored constraint. | |
| virtual bool | decide (const planning_models::KinematicState *state, bool verbose=false) const =0 |
| Decide whether the constraint is satisfied in the indicated state or group, if specified. | |
| KinematicConstraintEvaluator (void) | |
| virtual void | print (std::ostream &out=std::cout) const |
| Print the constraint data. | |
| virtual bool | use (const ros::Message *kc)=0 |
| This function assumes the constraint has been transformed into the proper frame, if such a transform is needed. | |
| virtual | ~KinematicConstraintEvaluator (void) |
Definition at line 57 of file kinematic_state_constraint_evaluator.h.
| planning_environment::KinematicConstraintEvaluator::KinematicConstraintEvaluator | ( | void | ) | [inline] |
Definition at line 61 of file kinematic_state_constraint_evaluator.h.
| virtual planning_environment::KinematicConstraintEvaluator::~KinematicConstraintEvaluator | ( | void | ) | [inline, virtual] |
Definition at line 65 of file kinematic_state_constraint_evaluator.h.
| virtual void planning_environment::KinematicConstraintEvaluator::clear | ( | void | ) | [pure virtual] |
Clear the stored constraint.
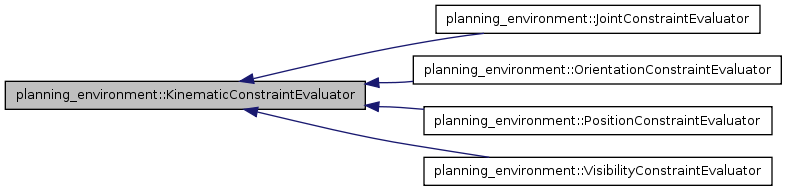
Implemented in planning_environment::JointConstraintEvaluator, planning_environment::OrientationConstraintEvaluator, planning_environment::VisibilityConstraintEvaluator, and planning_environment::PositionConstraintEvaluator.
| virtual bool planning_environment::KinematicConstraintEvaluator::decide | ( | const planning_models::KinematicState * | state, | |
| bool | verbose = false | |||
| ) | const [pure virtual] |
Decide whether the constraint is satisfied in the indicated state or group, if specified.
Implemented in planning_environment::JointConstraintEvaluator, planning_environment::OrientationConstraintEvaluator, planning_environment::VisibilityConstraintEvaluator, and planning_environment::PositionConstraintEvaluator.
| virtual void planning_environment::KinematicConstraintEvaluator::print | ( | std::ostream & | out = std::cout |
) | const [inline, virtual] |
Print the constraint data.
Reimplemented in planning_environment::JointConstraintEvaluator, planning_environment::OrientationConstraintEvaluator, planning_environment::VisibilityConstraintEvaluator, and planning_environment::PositionConstraintEvaluator.
Definition at line 80 of file kinematic_state_constraint_evaluator.h.
| virtual bool planning_environment::KinematicConstraintEvaluator::use | ( | const ros::Message * | kc | ) | [pure virtual] |
This function assumes the constraint has been transformed into the proper frame, if such a transform is needed.
Implemented in planning_environment::JointConstraintEvaluator, planning_environment::OrientationConstraintEvaluator, planning_environment::VisibilityConstraintEvaluator, and planning_environment::PositionConstraintEvaluator.

