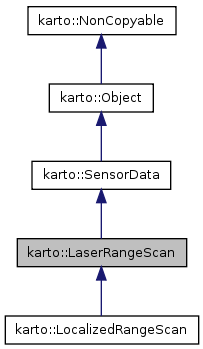
karto::LaserRangeScan Class Reference
#include <Karto.h>
List of all members.
Detailed Description
LaserRangeScan representing the range readings from a laser range finder sensor.
Definition at line 4740 of file Karto.h.
Constructor & Destructor Documentation
| karto::LaserRangeScan::LaserRangeScan |
( |
const Name & |
rSensorName, |
|
|
const RangeReadingsVector & |
rRangeReadings | |
|
) |
| | [inline] |
Constructs a scan from the given sensor with the given readings
- Parameters:
-
Definition at line 4763 of file Karto.h.
| virtual karto::LaserRangeScan::~LaserRangeScan |
( |
|
) |
[inline, virtual] |
| karto::LaserRangeScan::LaserRangeScan |
( |
const LaserRangeScan & |
|
) |
[private] |
Member Function Documentation
Gets the laser range finder sensor that generated this scan
- Returns:
- laser range finder sensor of this scan
Definition at line 4833 of file Karto.h.
| kt_int32u karto::LaserRangeScan::GetNumberOfRangeReadings |
( |
|
) |
const [inline] |
Gets the number of range readings
- Returns:
- number of range readings
Definition at line 4842 of file Karto.h.
| kt_double* karto::LaserRangeScan::GetRangeReadings |
( |
|
) |
const [inline] |
Gets the range readings of this scan
- Returns:
- range readings of this scan
Definition at line 4786 of file Karto.h.
Constructs a scan from the given sensor with the given readings
- Parameters:
-
Definition at line 4743 of file Karto.h.
| void karto::LaserRangeScan::SetRangeReadings |
( |
const RangeReadingsVector & |
rRangeReadings |
) |
[inline] |
Member Data Documentation
The documentation for this class was generated from the following file: