#include "icp.h"#include <utils/point.h>#include <utility>#include <list>#include <vector>#include <grid/map.h>#include <grid/harray2d.h>#include <utils/macro_params.h>#include <utils/stat.h>#include <iostream>#include <utils/gvalues.h>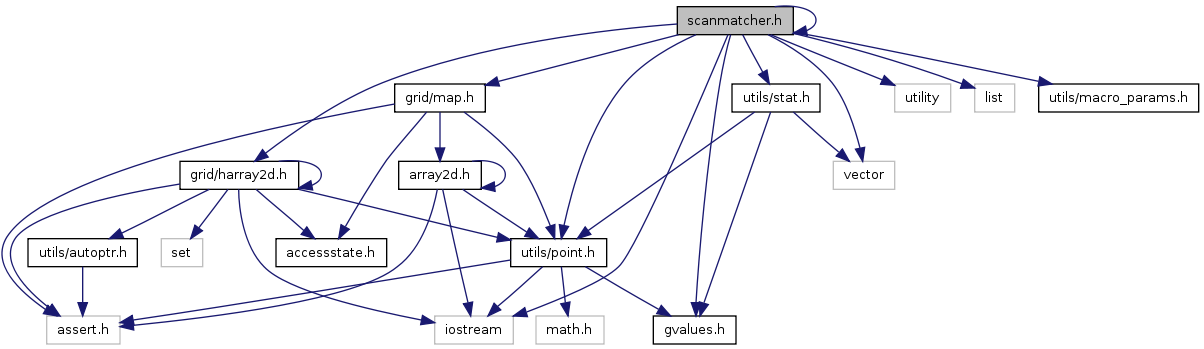
Go to the source code of this file.
Classes | |
| class | GMapping::ScanMatcher |
Namespaces | |
| namespace | GMapping |
Defines | |
| #define | LASER_MAXBEAMS 2048 |
| #define LASER_MAXBEAMS 2048 |
Definition at line 10 of file scanmatcher.h.

