#include <stdio.h>#include <stdlib.h>#include <string.h>#include <unistd.h>#include <math.h>#include "freenect_internal.h"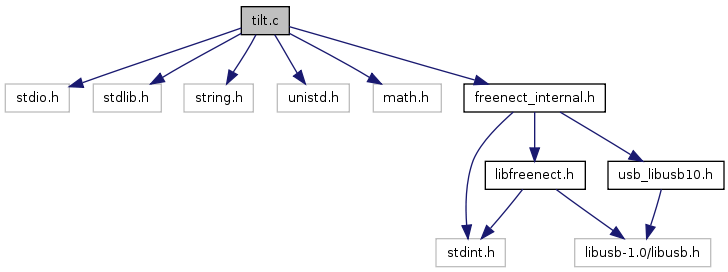
Go to the source code of this file.
Defines | |
| #define | GRAVITY 9.80665 |
| #define | MAX_TILT_ANGLE 31 |
| #define | MIN_TILT_ANGLE (-31) |
Functions | |
| double | freenect_get_tilt_degs (freenect_raw_device_state *state) |
| int | freenect_set_led (freenect_device *dev, freenect_led_options option) |
| int | freenect_set_tilt_degs (freenect_device *dev, double angle) |
| double freenect_get_tilt_degs | ( | freenect_raw_device_state * | state | ) |
| int freenect_set_led | ( | freenect_device * | dev, | |
| freenect_led_options | option | |||
| ) |
| int freenect_set_tilt_degs | ( | freenect_device * | dev, | |
| double | angle | |||
| ) |

