#include <btContinuousDynamicsWorld.h>
Public Member Functions | |
| btContinuousDynamicsWorld (btDispatcher *dispatcher, btBroadphaseInterface *pairCache, btConstraintSolver *constraintSolver, btCollisionConfiguration *collisionConfiguration) | |
| virtual void | calculateTimeOfImpacts (btScalar timeStep) |
| virtual btDynamicsWorldType | getWorldType () const |
| virtual void | internalSingleStepSimulation (btScalar timeStep) |
| time stepping with calculation of time of impact for selected fast moving objects | |
| virtual | ~btContinuousDynamicsWorld () |
Private Member Functions | |
| void | updateTemporalAabbs (btScalar timeStep) |
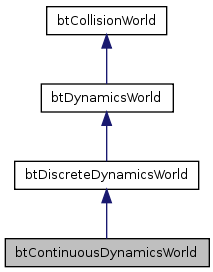
btContinuousDynamicsWorld adds optional (per object) continuous collision detection for fast moving objects to the btDiscreteDynamicsWorld. This copes with fast moving objects that otherwise would tunnel/miss collisions. Under construction, don't use yet! Please use btDiscreteDynamicsWorld instead.
Definition at line 24 of file btContinuousDynamicsWorld.h.
| btContinuousDynamicsWorld::btContinuousDynamicsWorld | ( | btDispatcher * | dispatcher, | |
| btBroadphaseInterface * | pairCache, | |||
| btConstraintSolver * | constraintSolver, | |||
| btCollisionConfiguration * | collisionConfiguration | |||
| ) |
| virtual btContinuousDynamicsWorld::~btContinuousDynamicsWorld | ( | ) | [virtual] |
| virtual void btContinuousDynamicsWorld::calculateTimeOfImpacts | ( | btScalar | timeStep | ) | [virtual] |
| virtual btDynamicsWorldType btContinuousDynamicsWorld::getWorldType | ( | ) | const [inline, virtual] |
Reimplemented from btDiscreteDynamicsWorld.
Definition at line 39 of file btContinuousDynamicsWorld.h.
| virtual void btContinuousDynamicsWorld::internalSingleStepSimulation | ( | btScalar | timeStep | ) | [virtual] |
time stepping with calculation of time of impact for selected fast moving objects
Reimplemented from btDiscreteDynamicsWorld.
| void btContinuousDynamicsWorld::updateTemporalAabbs | ( | btScalar | timeStep | ) | [private] |

