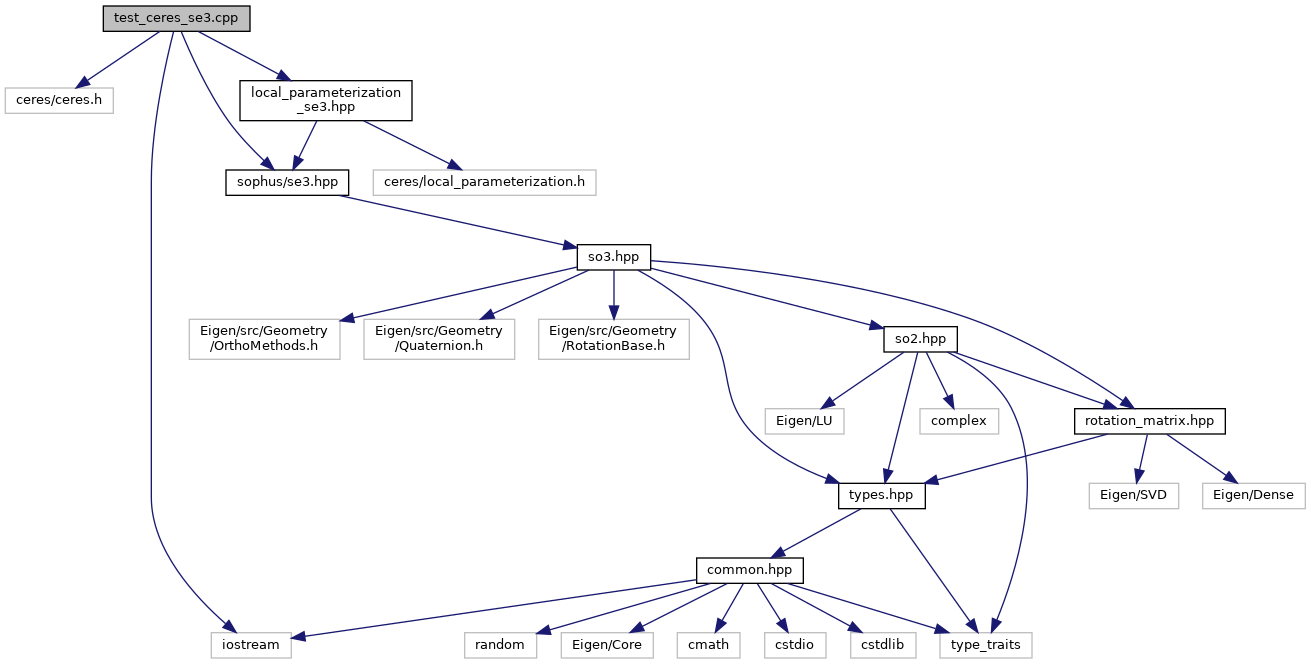
#include <ceres/ceres.h>#include <iostream>#include <sophus/se3.hpp>#include "local_parameterization_se3.hpp"
Include dependency graph for test_ceres_se3.cpp:
Go to the source code of this file.
Classes | |
| struct | Eigen::internal::cast_impl< ceres::Jet< T, N >, NewType > |
| struct | TestPointCostFunctor |
| struct | TestSE3CostFunctor |
Namespaces | |
| Eigen | |
| Eigen::internal | |
Functions | |
| template<typename Scalar > | |
| bool | CreateSE3FromMatrix (const Eigen::Matrix< Scalar, 4, 4 > &mat) |
| int | main (int, char **) |
| bool | test (Sophus::SE3d const &T_w_targ, Sophus::SE3d const &T_w_init, Sophus::SE3d::Point const &point_a_init, Sophus::SE3d::Point const &point_b) |
Function Documentation
◆ CreateSE3FromMatrix()
template<typename Scalar >
| bool CreateSE3FromMatrix | ( | const Eigen::Matrix< Scalar, 4, 4 > & | mat | ) |
Definition at line 132 of file test_ceres_se3.cpp.
◆ main()
| int main | ( | int | , |
| char ** | |||
| ) |
Definition at line 138 of file test_ceres_se3.cpp.
◆ test()
| bool test | ( | Sophus::SE3d const & | T_w_targ, |
| Sophus::SE3d const & | T_w_init, | ||
| Sophus::SE3d::Point const & | point_a_init, | ||
| Sophus::SE3d::Point const & | point_b | ||
| ) |
Definition at line 84 of file test_ceres_se3.cpp.