#include <algorithm>#include "pinocchio/multibody/model.hpp"#include "pinocchio/algorithm/fwd.hpp"#include "pinocchio/algorithm/constraints/fwd.hpp"#include "pinocchio/algorithm/constraints/constraint-model-base.hpp"#include "pinocchio/algorithm/constraints/constraint-data-base.hpp"
Include dependency graph for algorithm/contact-info.hpp:
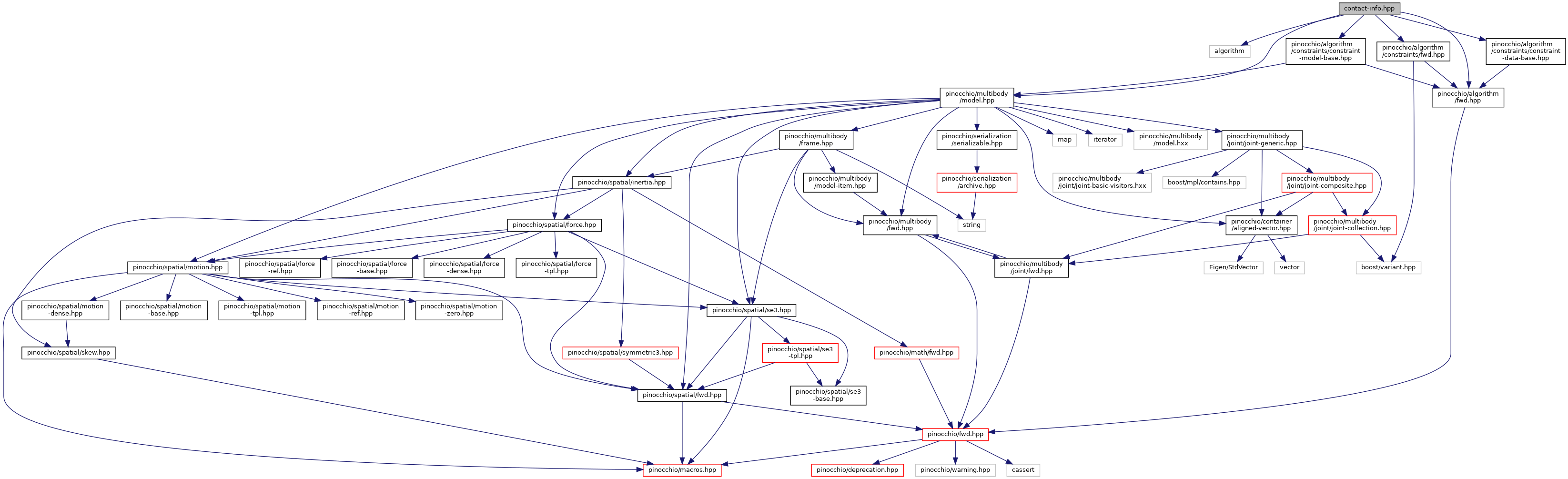
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Namespaces | |
| pinocchio | |
| Main pinocchio namespace. | |
Macros | |
| #define | PINOCCHIO_INTERNAL_COMPUTATION(axis_id, v3_in, res) |
| #define | PINOCCHIO_INTERNAL_COMPUTATION(axis_id, v3_in, res) |
Enumerations | |
| enum | pinocchio::ContactType { pinocchio::CONTACT_3D = 0, pinocchio::CONTACT_6D, pinocchio::CONTACT_UNDEFINED } |
| More... | |
Functions | |
| template<typename Scalar , int Options, class Allocator > | |
| struct PINOCCHIO_UNSUPPORTED_MESSAGE("The API will change towards more flexibility") RigidConstraintModelTpl size_t | pinocchio::getTotalConstraintSize (const std::vector< RigidConstraintModelTpl< Scalar, Options >, Allocator > &contact_models) |
| Contact model structure containg all the info describing the rigid contact model. More... | |
Macro Definition Documentation
◆ PINOCCHIO_INTERNAL_COMPUTATION [1/2]
| #define PINOCCHIO_INTERNAL_COMPUTATION | ( | axis_id, | |
| v3_in, | |||
| res | |||
| ) |
Value:
CartesianAxis<axis_id>::cross(v3_in, v_tmp); \
res.col(axis_id).noalias() = oMl.rotation().transpose() * v_tmp;
◆ PINOCCHIO_INTERNAL_COMPUTATION [2/2]
| #define PINOCCHIO_INTERNAL_COMPUTATION | ( | axis_id, | |
| v3_in, | |||
| res | |||
| ) |
Value:
CartesianAxis<axis_id>::cross(v3_in, v_tmp); \
res.col(axis_id).noalias() = oM1.rotation().transpose() * v_tmp;