trajectory_processing
src
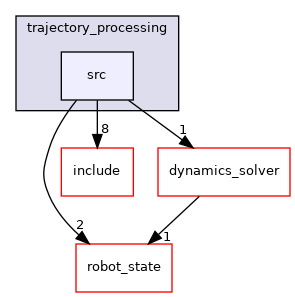
src Directory Reference
Directory dependency graph for src:
Files
file
iterative_spline_parameterization.cpp
[code]
file
iterative_time_parameterization.cpp
[code]
file
iterative_torque_limit_parameterization.cpp
[code]
file
limit_cartesian_speed.cpp
[code]
file
ruckig_traj_smoothing.cpp
[code]
file
time_optimal_trajectory_generation.cpp
[code]
file
trajectory_tools.cpp
[code]
moveit_core
Author(s): Ioan Sucan
, Sachin Chitta
, Acorn Pooley
autogenerated on Sat May 3 2025 02:25:34