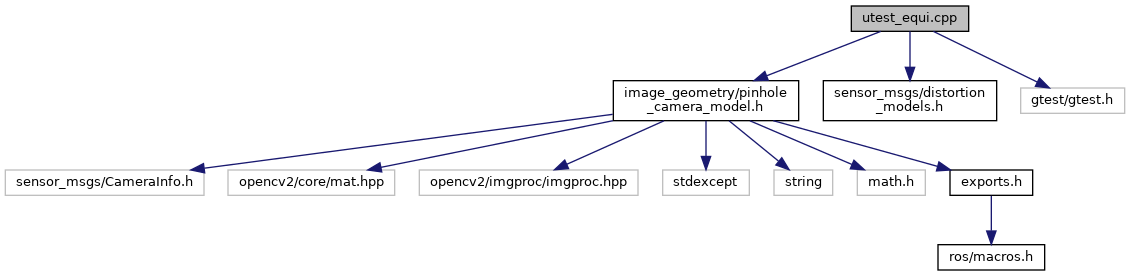
#include "image_geometry/pinhole_camera_model.h"#include <sensor_msgs/distortion_models.h>#include <gtest/gtest.h>
Include dependency graph for utest_equi.cpp:
Go to the source code of this file.
Classes | |
| class | EquidistantTest |
Functions | |
| int | main (int argc, char **argv) |
| TEST_F (EquidistantTest, accessorsCorrect) | |
| TEST_F (EquidistantTest, getDeltas) | |
| TEST_F (EquidistantTest, initialization) | |
| TEST_F (EquidistantTest, projectPoint) | |
| TEST_F (EquidistantTest, rectifyIfCalibrated) | |
| TEST_F (EquidistantTest, rectifyPoint) | |
Function Documentation
◆ main()
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 253 of file utest_equi.cpp.
◆ TEST_F() [1/6]
| TEST_F | ( | EquidistantTest | , |
| accessorsCorrect | |||
| ) |
Definition at line 47 of file utest_equi.cpp.
◆ TEST_F() [2/6]
| TEST_F | ( | EquidistantTest | , |
| getDeltas | |||
| ) |
Definition at line 133 of file utest_equi.cpp.
◆ TEST_F() [3/6]
| TEST_F | ( | EquidistantTest | , |
| initialization | |||
| ) |
Definition at line 149 of file utest_equi.cpp.
◆ TEST_F() [4/6]
| TEST_F | ( | EquidistantTest | , |
| projectPoint | |||
| ) |
Definition at line 56 of file utest_equi.cpp.
◆ TEST_F() [5/6]
| TEST_F | ( | EquidistantTest | , |
| rectifyIfCalibrated | |||
| ) |
- Todo:
- use forward distortion for a better test
Definition at line 162 of file utest_equi.cpp.
◆ TEST_F() [6/6]
| TEST_F | ( | EquidistantTest | , |
| rectifyPoint | |||
| ) |
- Todo:
- Need R = identity for the principal point tests.
Definition at line 90 of file utest_equi.cpp.